

Multi-viewpoint cloud global optimization registration method based on hierarchical closed loop constraint
A global optimization, closed-loop technology, used in image analysis, image enhancement, instrumentation, etc., to solve problems such as incomplete 3D target data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
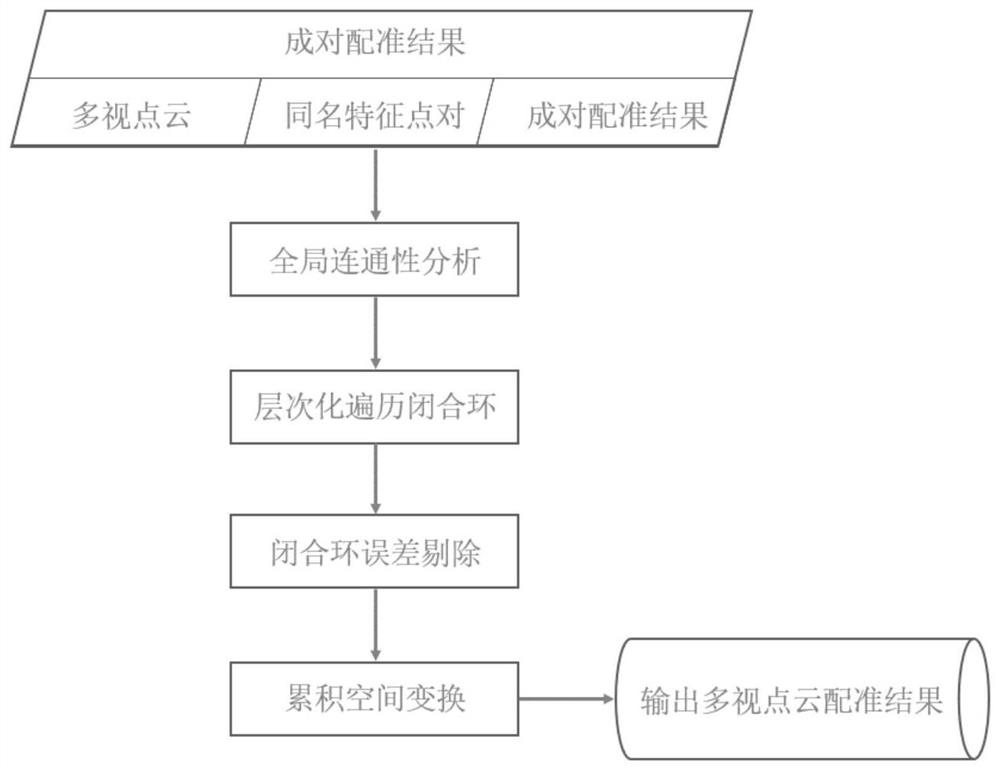
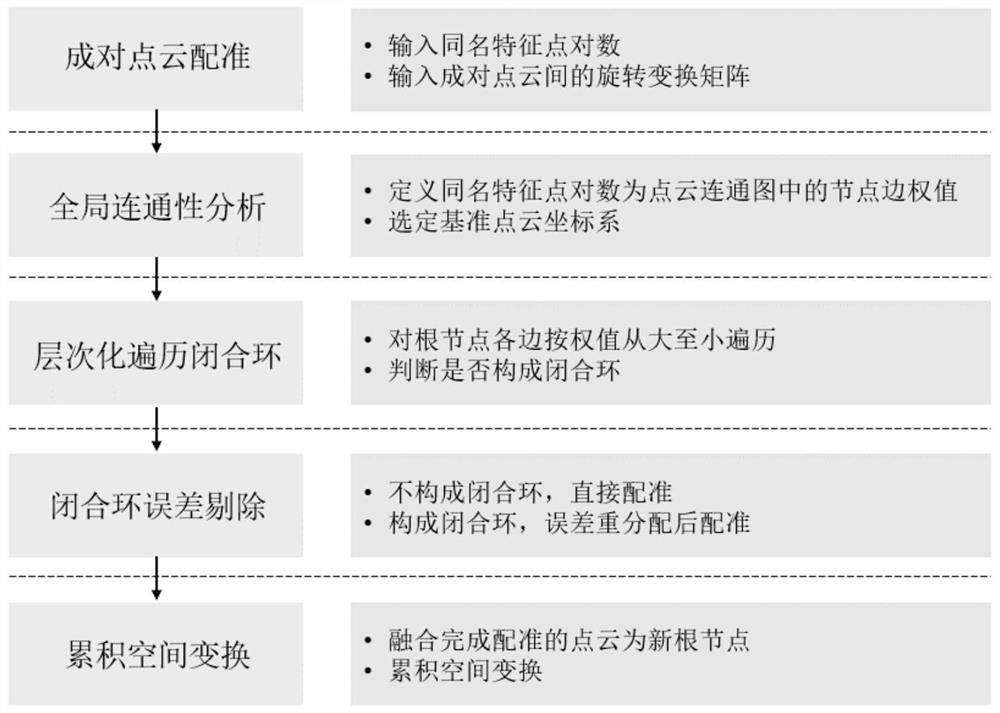
[0034]Aiming at the hand-held laser scanning point clouds captured under different scanning angles, the present invention proposes a method based on hierarchical closed-loop constraints, for point cloud pairs that have completed feature extraction and pairwise registration, through the least squares joint adjustment error Analysis and correction, and a multi-view point cloud global optimization registration method. The overall technical process of the present invention consists of figure 1 shown. This method is divided into four key steps: global connectivity analysis, hierarchical traversal closed loop, closed loop error elimination and cumulative space transformation. The specific implementation steps of this method are figure 2 shown.
[0035] Step 1, select the datum point cloud coordinate system. First, read the multi-view point cloud file, the feature point pair information with the same name extracted based on feature consistency and geometric consistency, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More