

Smoothing method for Cartesian space motion trail of six-axis series industrial robot
An industrial robot, Cartesian space technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as insufficient feature representation accuracy, low crack image recognition accuracy, and inability to quantitatively describe complex crack details. The transition curvature is continuous, improving the operation efficiency and avoiding the effect of acceleration and deceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
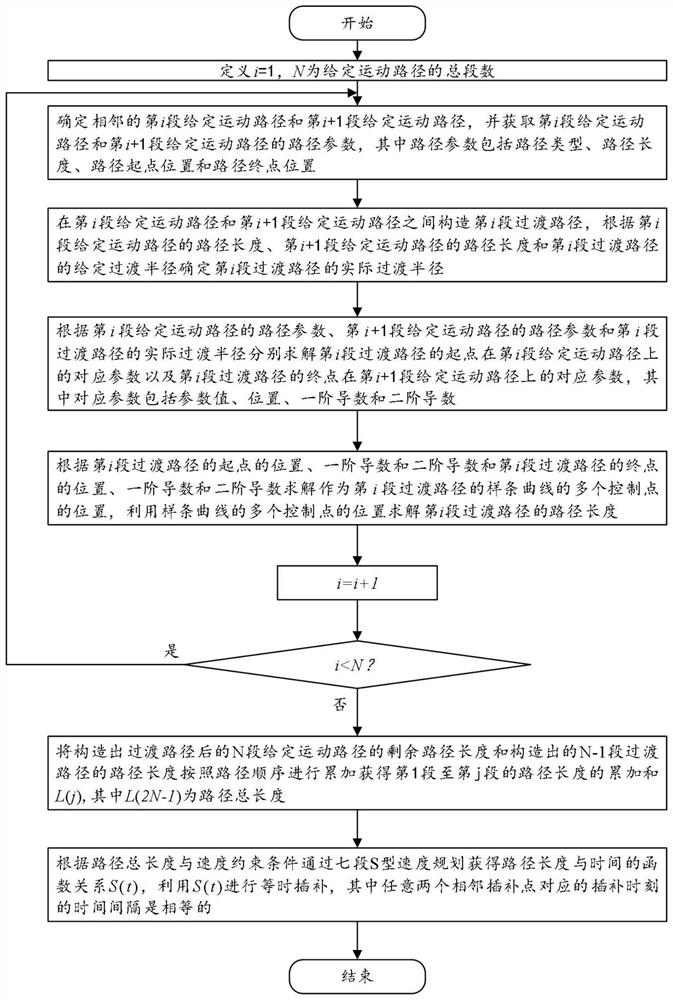
[0083] see Figure 1 to Figure 4 As shown, the present invention provides a method for smoothing the Cartesian space motion trajectory of a six-axis series industrial robot, which specifically includes the following steps.
[0084] Step 1: define i=1, and N is the total segment number of a given motion path;
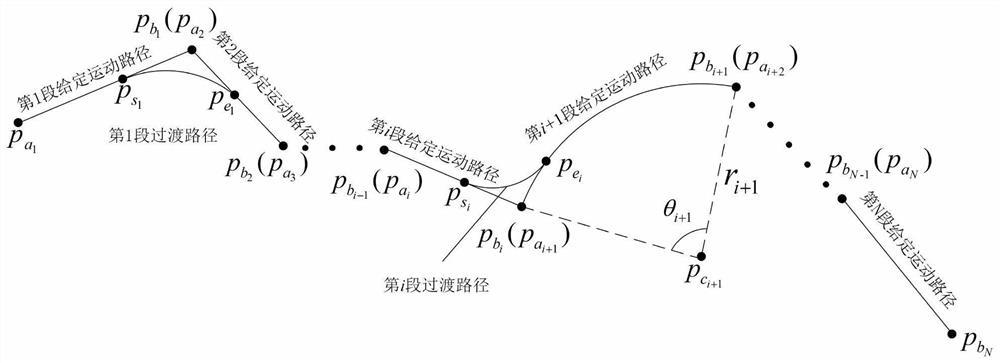
[0085] Step 2: Determine the adjacent given motion path of the i-th segment and the given motion path of the i+1 segment, and obtain the path parameters of the given motion path of the i-th segment and the given motion path of the i+1 segment, Wherein said path parameter comprises path type, path length, path start position and path end position;
[0086] Step 3: Construct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More