

Unmanned aerial vehicle cooperative formation method based on finite time control
An unmanned aerial vehicle, finite-time technology, applied in the field of unmanned aerial vehicles, can solve the problems of less research on finite-time control law design, difficulty in designing control laws related to non-smooth control characteristics, etc., and achieve small calculation and continuous controller signals Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
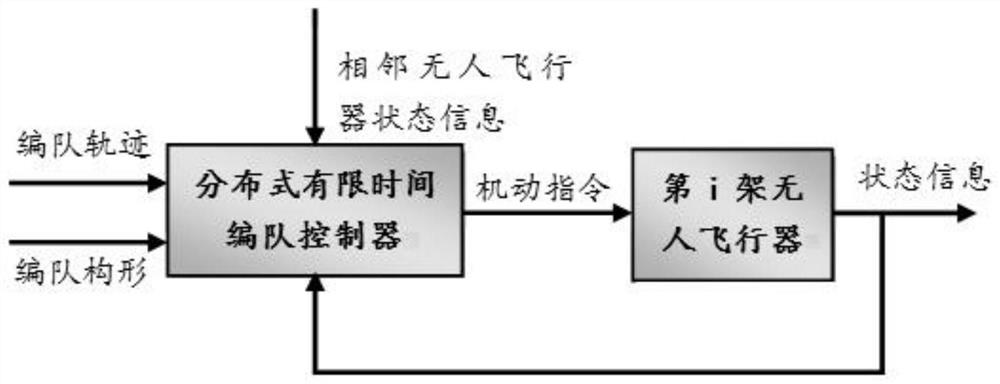
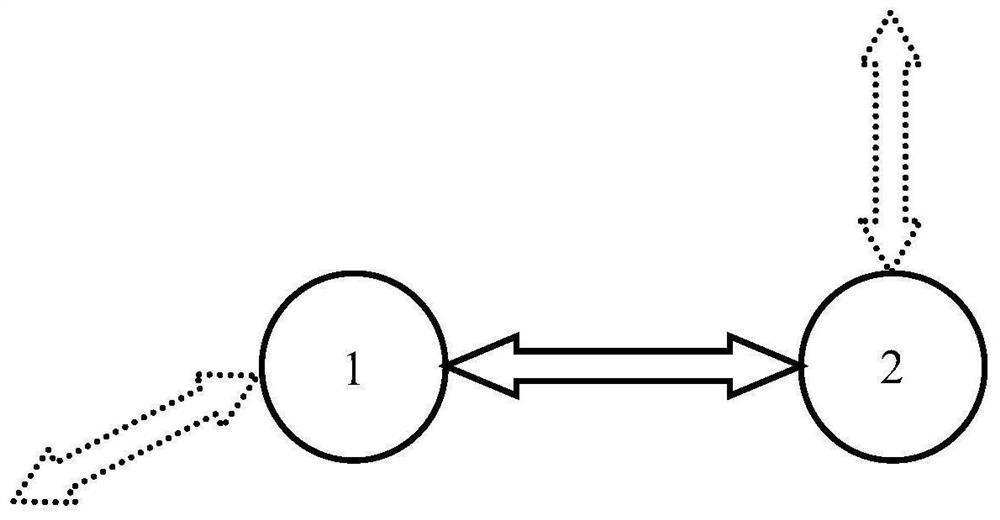
[0035] refer to figure 1 with figure 2 , the present invention provides a kind of unmanned aerial vehicle cooperative formation method based on finite time control, and this method comprises the following steps:
[0036] During the flight, the UAV continuously obtains its own status information through the airborne inertial measurement unit, and transmits this status information to the distributed finite-time formation controller and adjacent UAVs. While re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More