

A multi-UAV search route planning method and device
A technology for route planning and multiple drones, applied in the field of drones, can solve the problem of not considering the uncertainty of the target position, and achieve the effect of avoiding repeated waste.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
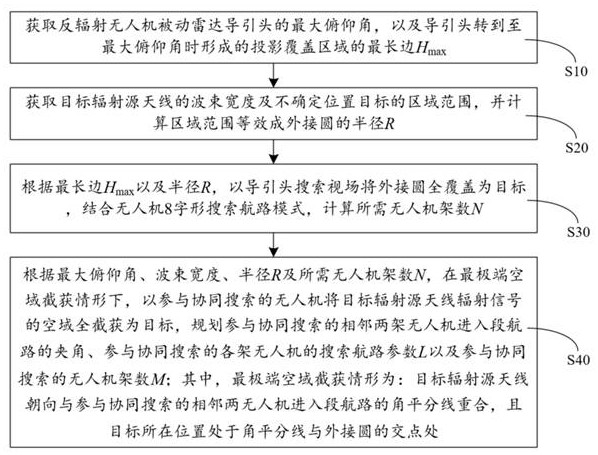
[0043] Please see first figure 1 , figure 1 It is a multi-UAV search route planning method provided by the present invention for the situation where the target position is uncertain and the antenna orientation of the target radiation source is uncertain. figure 1 As shown, the multi-UAV search route planning method includes steps S10-S40, which are described in detail as follows:
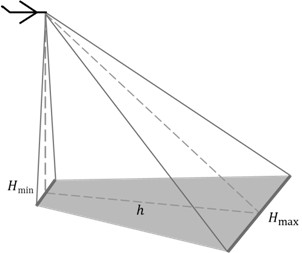
[0044] S10, obtain the maximum pitch angle of the passive radar seeker of the anti-radiation UAV, and the projected coverage area formed when the seeker rotates to the maximum pitch angle (such as figure 2 the lon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More