

Polypod walking robot capable of being disassembled and reconstructed
A walking robot and rack technology, applied in the field of robots, can solve problems such as inability to solve problems, increased failure rate, inability to work, etc., to avoid redundancy in structure and function, reduce use and manufacturing costs, and widen development space. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Below in conjunction with accompanying drawing and example the present invention will be described in further detail,
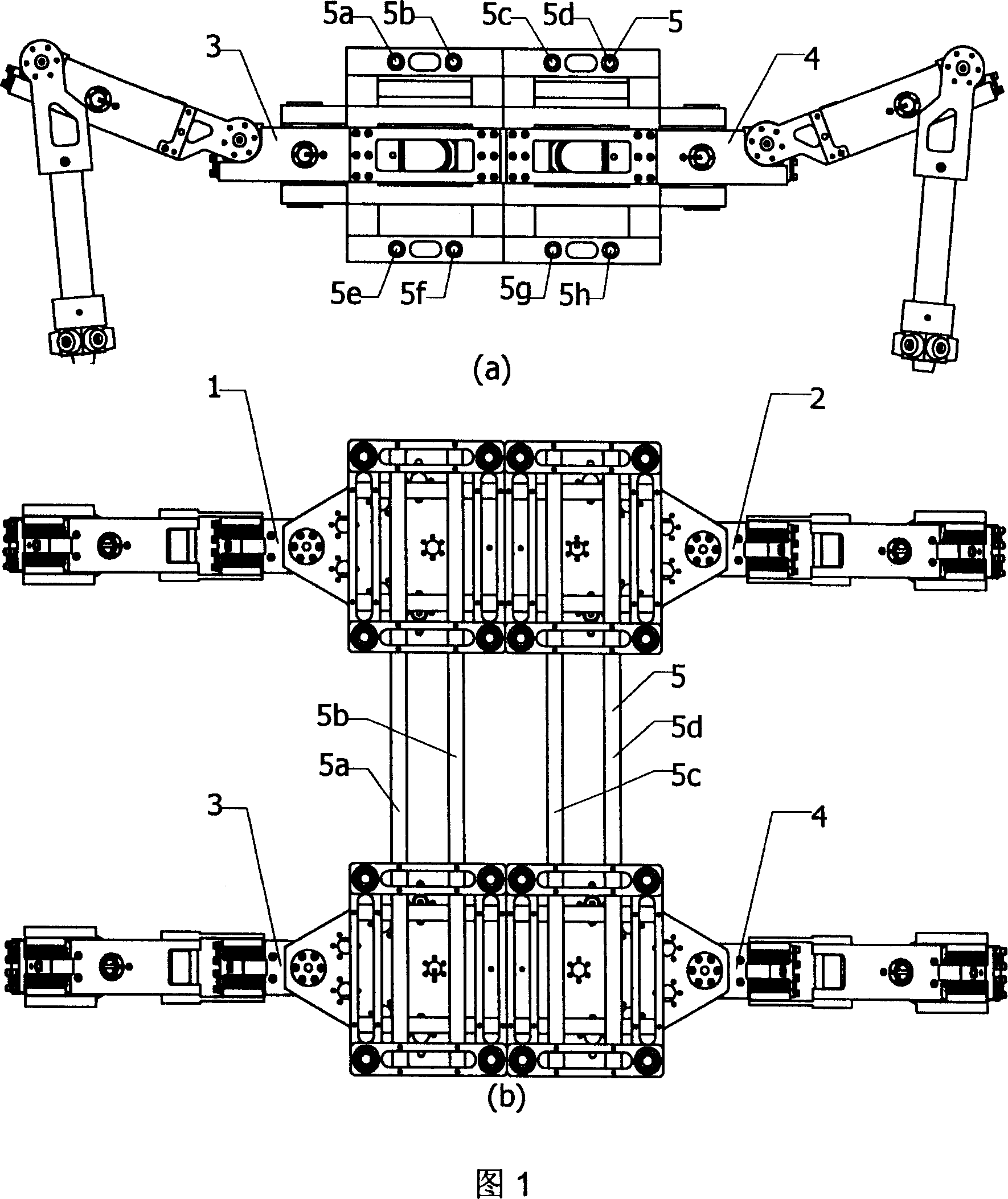
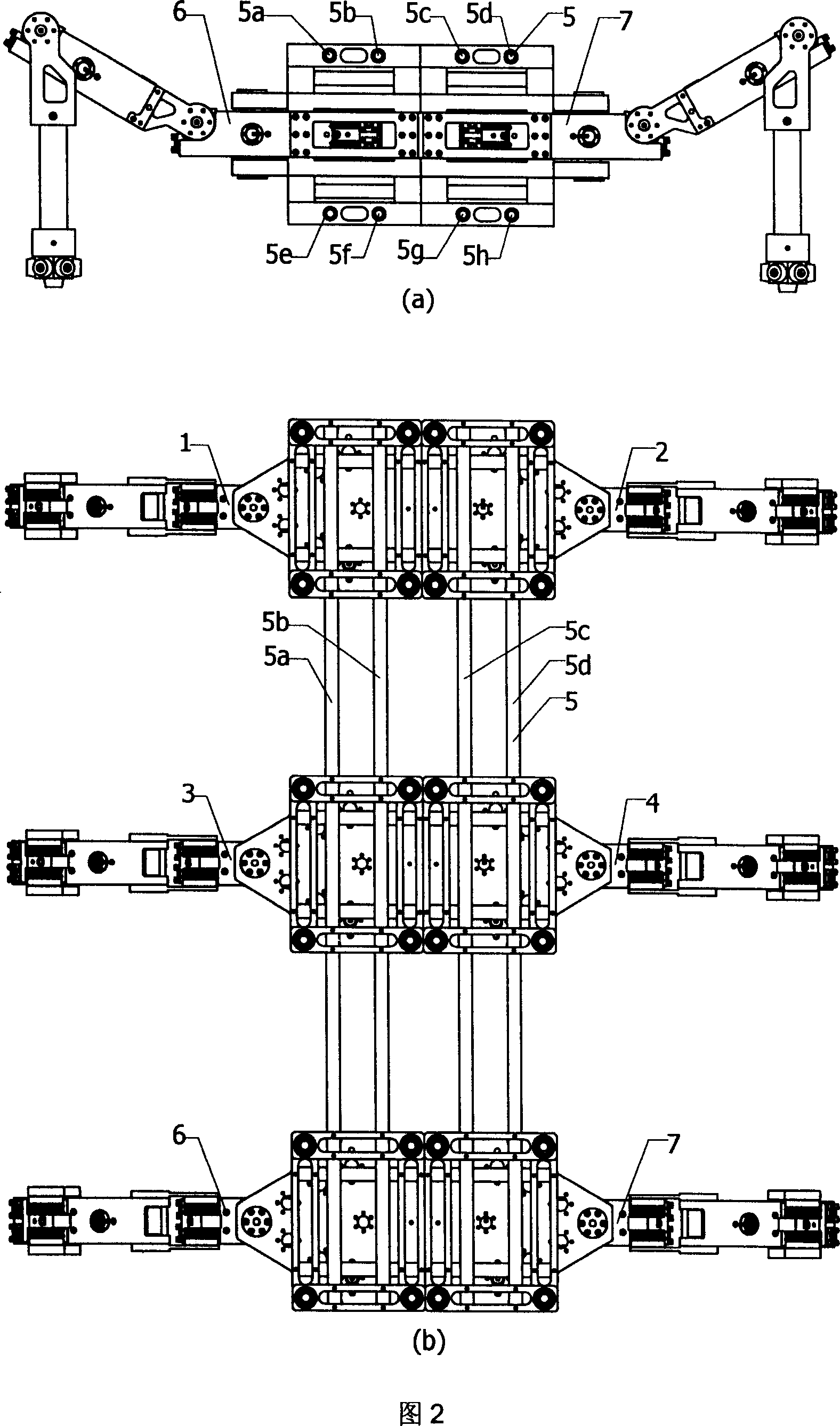
[0018] As shown in Figure 1, the quadruped configuration includes a first foot unit 1, a second foot unit 2, a third foot unit 3, a fourth foot unit 4 and a fuselage support 5, wherein an upper support beam is arranged on the fuselage support and the lower support beams are respectively first to fourth upper support beams 5a, 5b, 5c, 5d and first to fourth lower support beams 5e, 5f, 5g, 5h.
[0019] The tail end of the upper and lower frame of the first foot unit 1 links to each other with the tail end of the upper and lower frame of the second foot unit 2, the tail end of the upper and lower frame of the third foot unit 3 and the fourth foot unit The tail ends of the upper and lower racks of 4 are connected. The first and second upper support beams 5a, 5b and the first and second lower support beams 5e, 5f are successively installed on the upper fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More