

Unmanned underwater vehicle and method for operating an unmanned underwater vehicle
a technology for underwater vehicles and underwater vehicles, applied in waterborne vessels, underwater equipment, special-purpose vessels, etc., to achieve accurate positioning and improve navigation of underwater vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
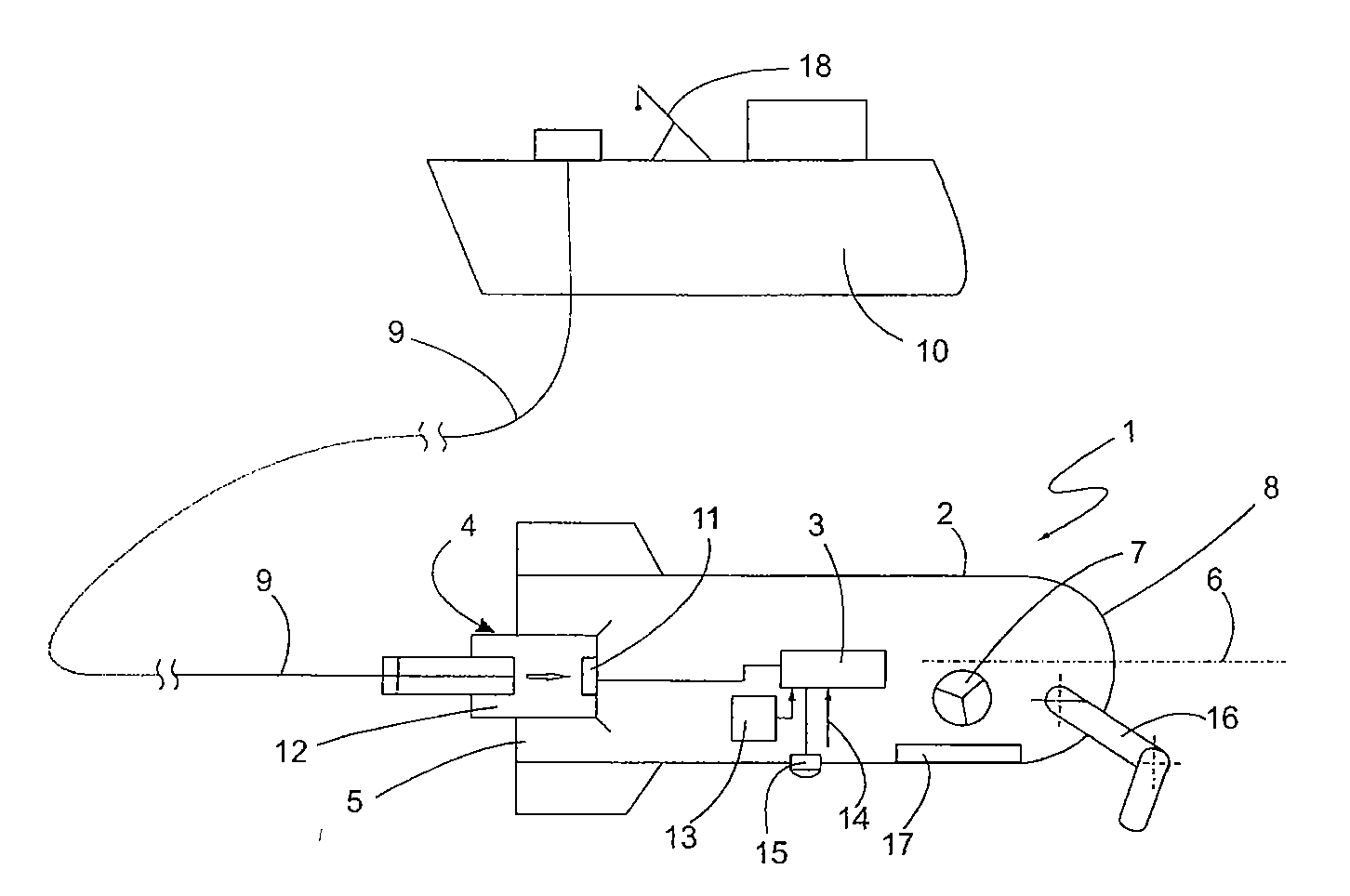
[0029]FIG. 1 shows an unmanned underwater vehicle 1 with a pressure-resistant hull 2. Different operating devices of the underwater vehicle 1 are arranged in or on the hull 2, for example power supply, communication, navigation and drive devices. The operating devices which are not illustrated in any more detail are controlled by a control device 3 of the underwater vehicle according to predefinable control commands. The underwater vehicle 1 also comprises suitable sensors, for example sonar sensors, the measurement results of which are used by the control device 3 to control the operating devices, for example for the purpose of navigation.
[0030]The unmanned underwater vehicle 1 has a main drive 4 in the region of its stern 5, which drive acts in a longitudinal direction 6 of the underwater vehicle 1. In addition to the main drive 4, the underwater vehicle 1 has a manoeuvring drive 7 which acts in a direction which differs from the longitudinal direction 6 and enables accurate posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More