

Active-passive combined swinging arm type rhombic lunar rover moving system
A mobile system and rocker-type technology, which is applied in the field of rocker-type rhombic lunar rover mobile system, can solve the problems of insufficient motor efficiency, weak climbing and obstacle-crossing capabilities, uneven gravity distribution, etc., and achieve good off-road Performance, improved steering flexibility, improved passing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
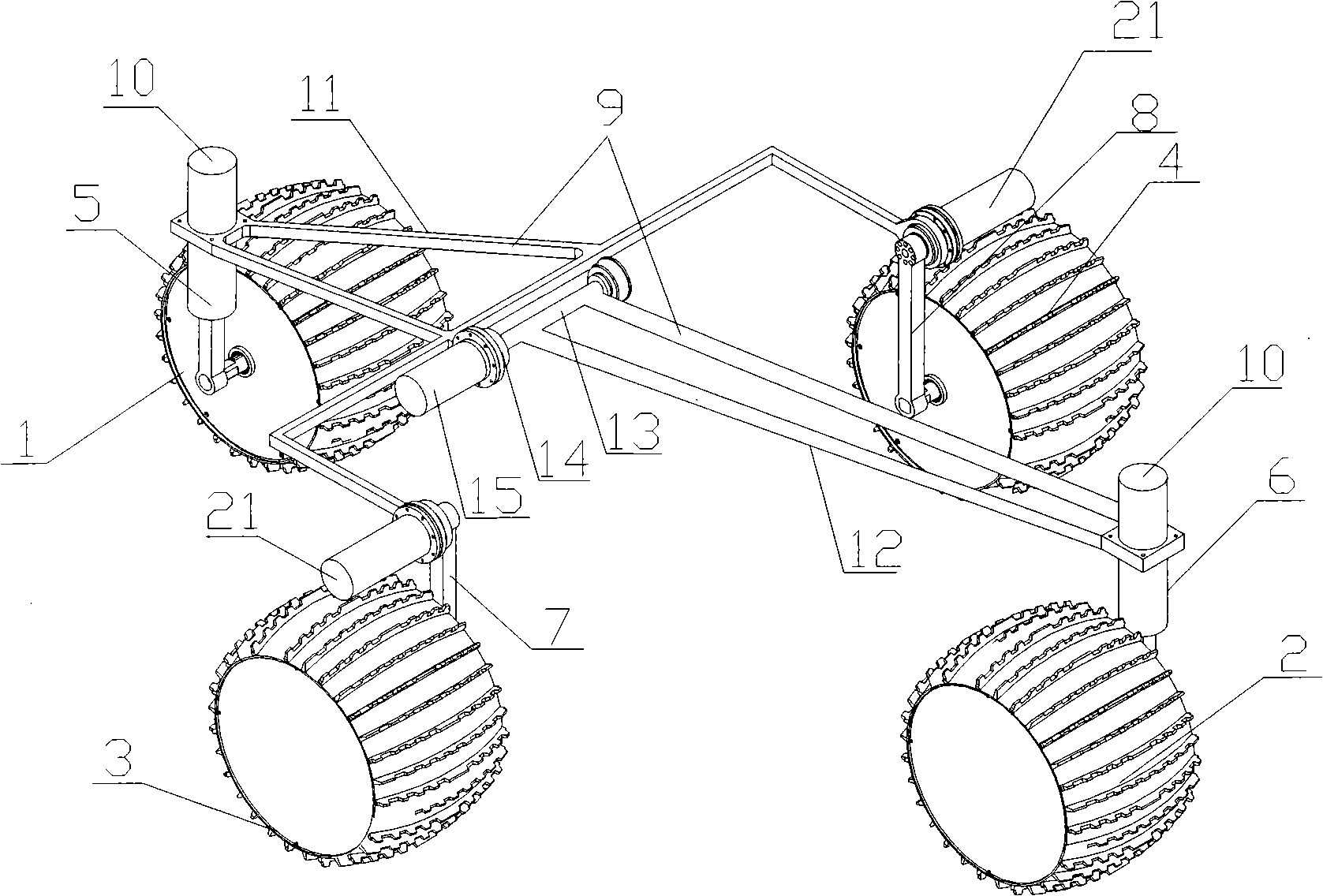
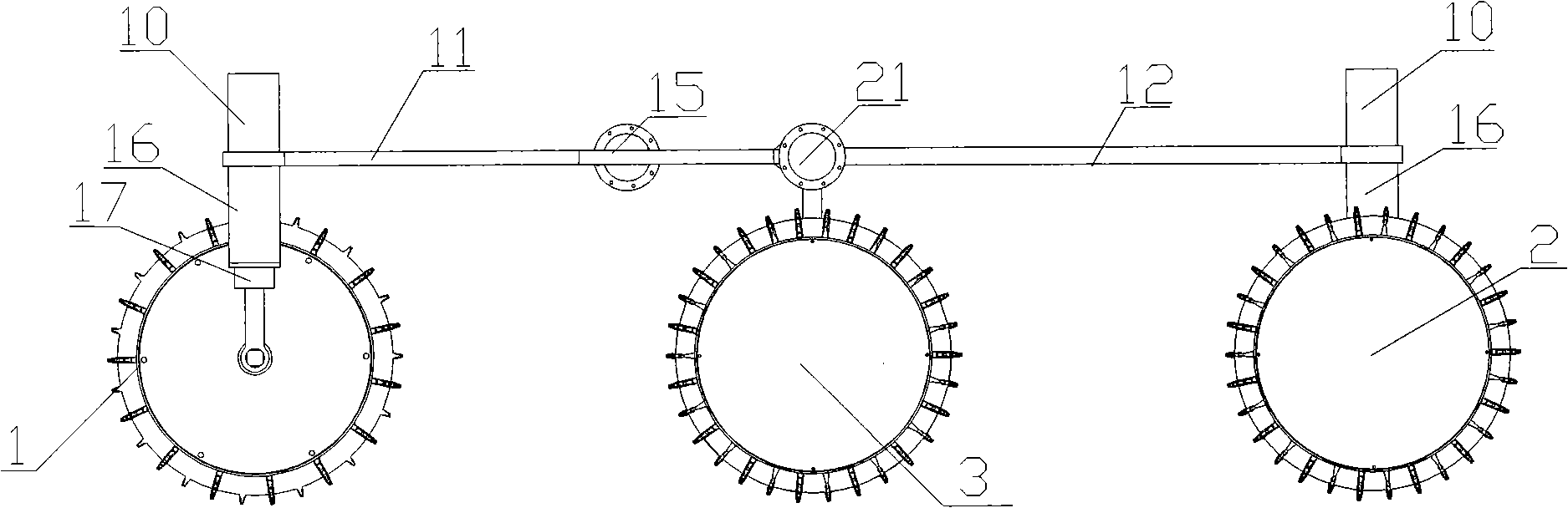
[0040] Such as figure 1 , figure 2 , image 3 Shown, active and passive combination rocker type rhombic lunar rover mobile system of the present invention, it comprises rotatable vehicle frame 9 and is installed on vehicle frame 9 the front wheel 1 of rhombus arrangement, rear wheel 2, left wheel 3 and right wheel 4. The front wheel 1 and the rear wheel 2 are fixed on the vehicle frame 9 through the front suspension system 5 and the rear suspension system 6 respectively, and the left wheel 3 and the right wheel 4 are fixed on the vehicle frame 9 through the left suspension system 7 and the right suspension system 8 respectively. On the vehicle frame 9, the front suspension system 5 and the rear suspension system 6 are all made up of a linkage and a steering mechanism, and the left suspension system 7 and the right suspension system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More