

Method for detecting target protruding from plane based on double viewing fields without calibration
A technology for calibrating plane and target detection, which is applied in image data processing, instruments, computing and other directions, and can solve the problems that it is difficult to meet the requirements of accuracy and real-time performance of 3D vision system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0072] The present invention will be described in detail below with reference to the drawings and specific embodiments.
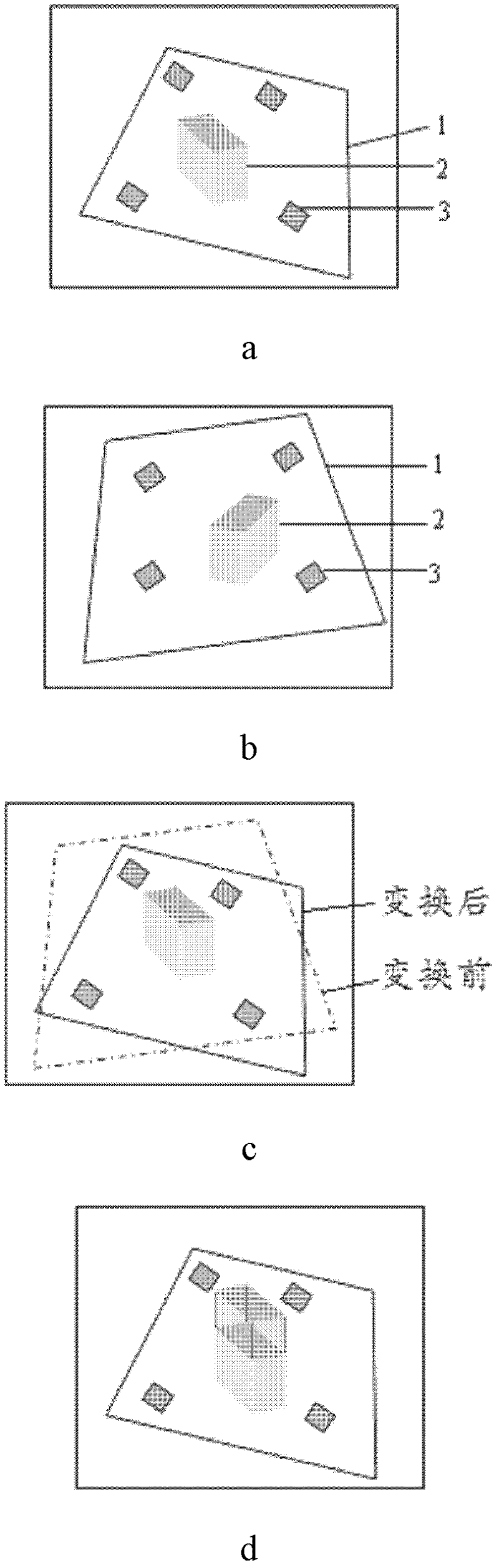
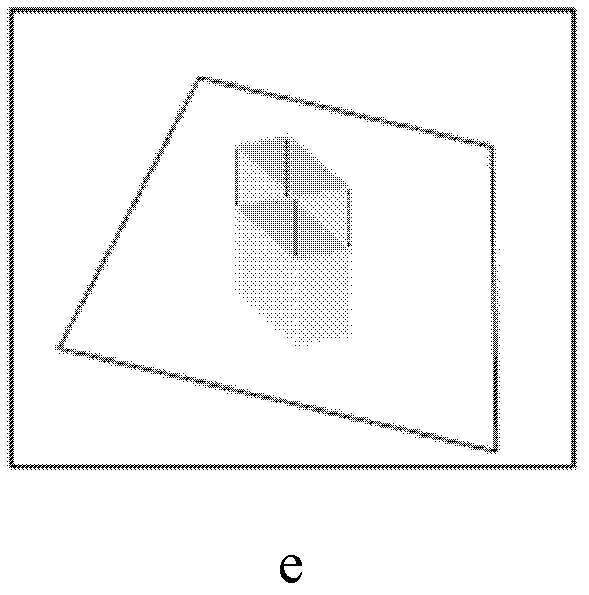
[0073] The present invention proposes a method for detecting non-calibrated planar protrusion targets without camera calibration based on dual fields of view. By homography transformation between two images, the pixels on the same plane are matched, and the pixels on different surfaces are A certain aberration is generated, and the planar protrusion target is determined according to the aberration. The method is implemented according to the following steps:
[0074] Step 1. Setting of scene marker
[0075] Before the image is collected, four simple markers 3 are set on the plane 1 (such as the ground, desktop) of the target to be detected. The markers 3 to be set are thin white paper strips with different brightness from the plane. The marker 3 is set in the largest possible range of the effective field of view of the shooting scene, such as figure 1 a. figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More