

A Navigation Control Method for Farm Tractor Based on Nonsmooth Control and Disturbance Observation
A technology of disturbance observation and control method, applied in the field of navigation control of agricultural tractors, can solve the problems of high labor intensity of drivers, large expected trajectory error, small control energy, etc. The effect of perturbing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in further detail below in conjunction with the accompanying drawings.
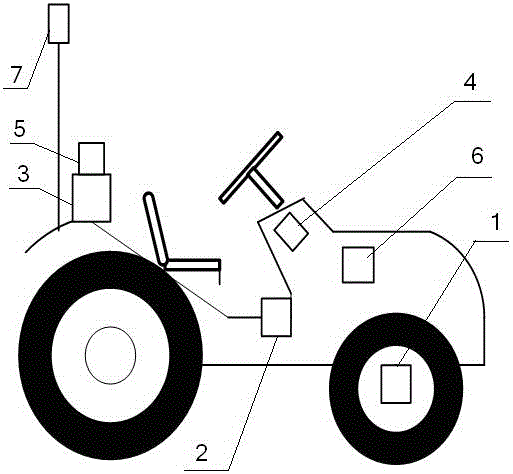
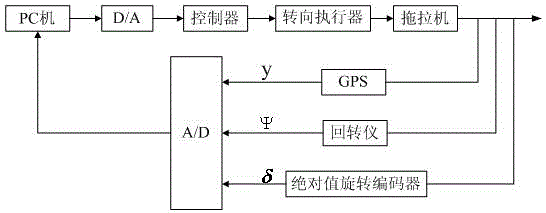
[0046] The agricultural tractor linear navigation system is mainly composed of the following parts, namely the agricultural tractor body (which can be transformed from an ordinary tractor), GPS equipment 7, automatic tracking and positioning instrument 6, steering wheel deflection detection sensor (absolute value rotary encoder 1), Heading angle detection sensor (gyroscope 2), navigation controller 5, steering actuator 4, computer 3, etc. For specific distribution, see figure 1 . Generally speaking, the automatic tracking position measuring instrument 6 is used to monitor the position of the tractor, thereby combining with the signal obtained by the GPS device 7 to determine the lateral deviation; the gyroscope 2 is used as the heading angle detection sensor of the tractor to measure the heading angle of the tractor; Absolute rotary encoder 1 is used to monito...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More