

Self-locking boosting type flexible and smooth tail end gripper for serial connection loose hinge
A living-leaf hinge and gripper technology, which is applied to manipulators, program-controlled manipulators, chucks, etc., can solve the problems of insufficient driving force, insufficient pressure, and large force ratio, achieving good versatility, reliable grasping, Good boosting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below is working principle and working process of the present invention:
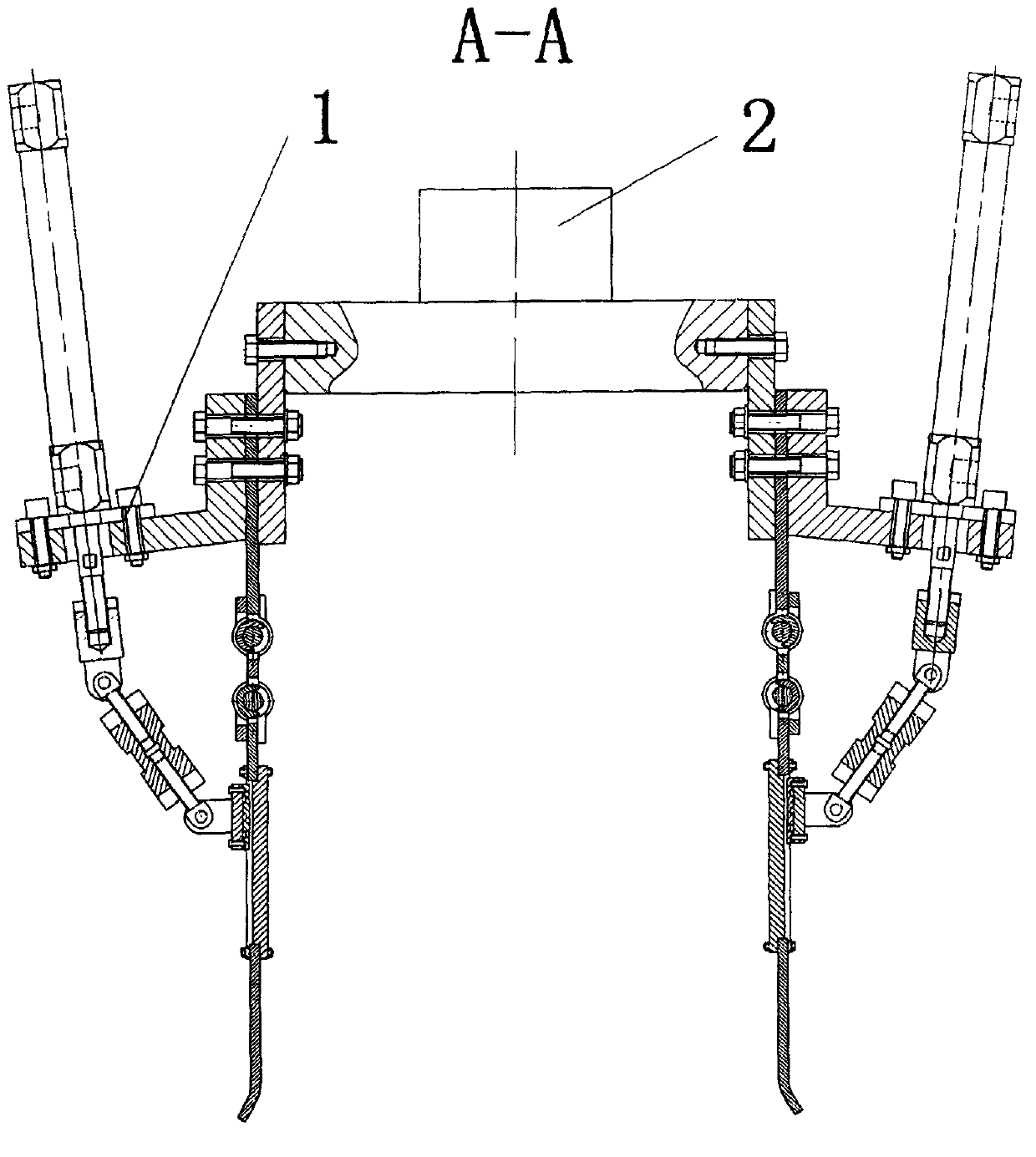
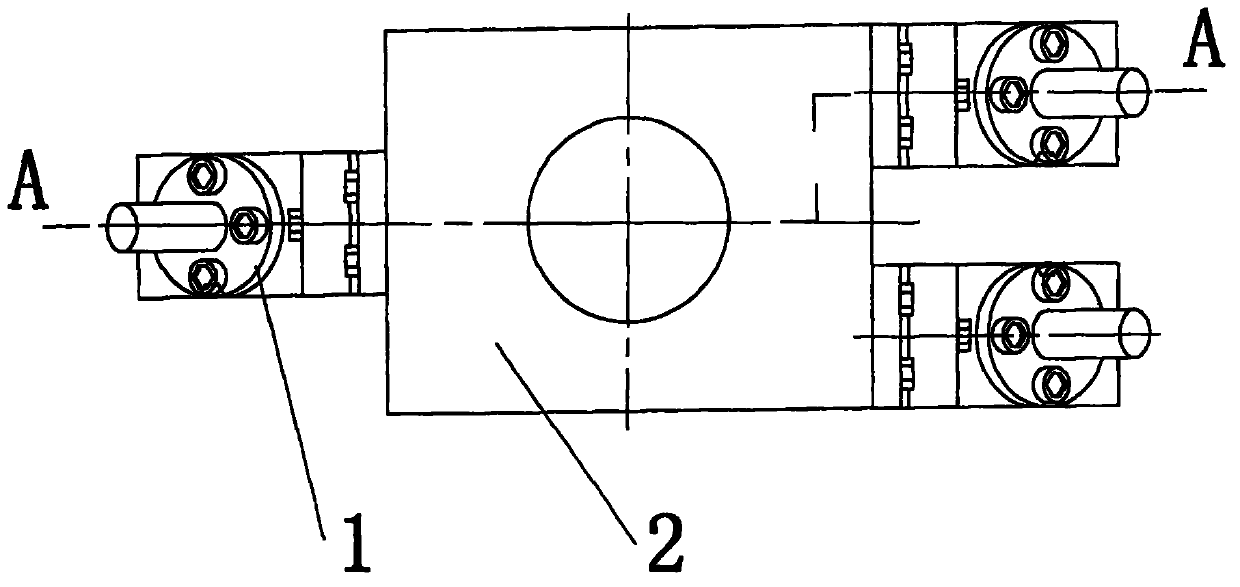
[0024] Such as figure 1 , 2 As shown, the research and analysis process: For long and rectangular complex objects, after theoretical analysis and experimental research, according to the range of shape, size and material of the grasped object, the safe range of grasping contact force is determined, and the design is optimized. Structural dimensions, two leaf spring characteristic parameters and pre-tightening angle determine the size of the palm, and adjust the length of the two power levers (left threaded hinge lever 11a, threaded sleeve 12a, right threaded hinge lever 13a form).
[0025] The optimization goal is: when the required grasping contact force is reached, the air pressure in the inner guide cylinder 1a reaches the system pressure, and the final included angle exceeds the friction angle of the linear guide slider 8a on the linear guide chute 7a, resulting in self-locking, and the inner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More