

Walking mechanism and control method of worm-like robot running in nuclear fusion cabin
A walking mechanism and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as unstable operation, lowering, limited space detection range and positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
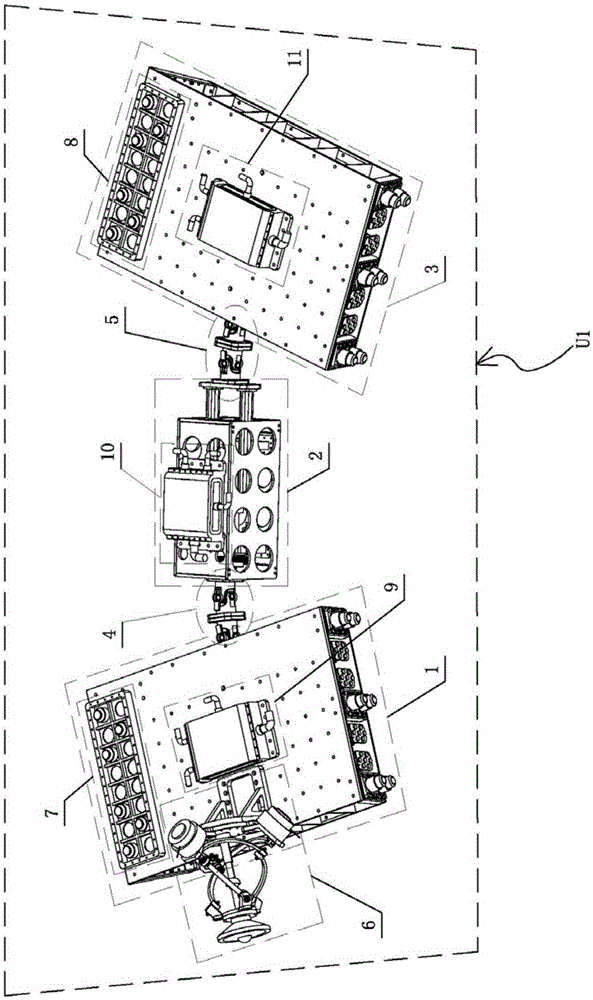
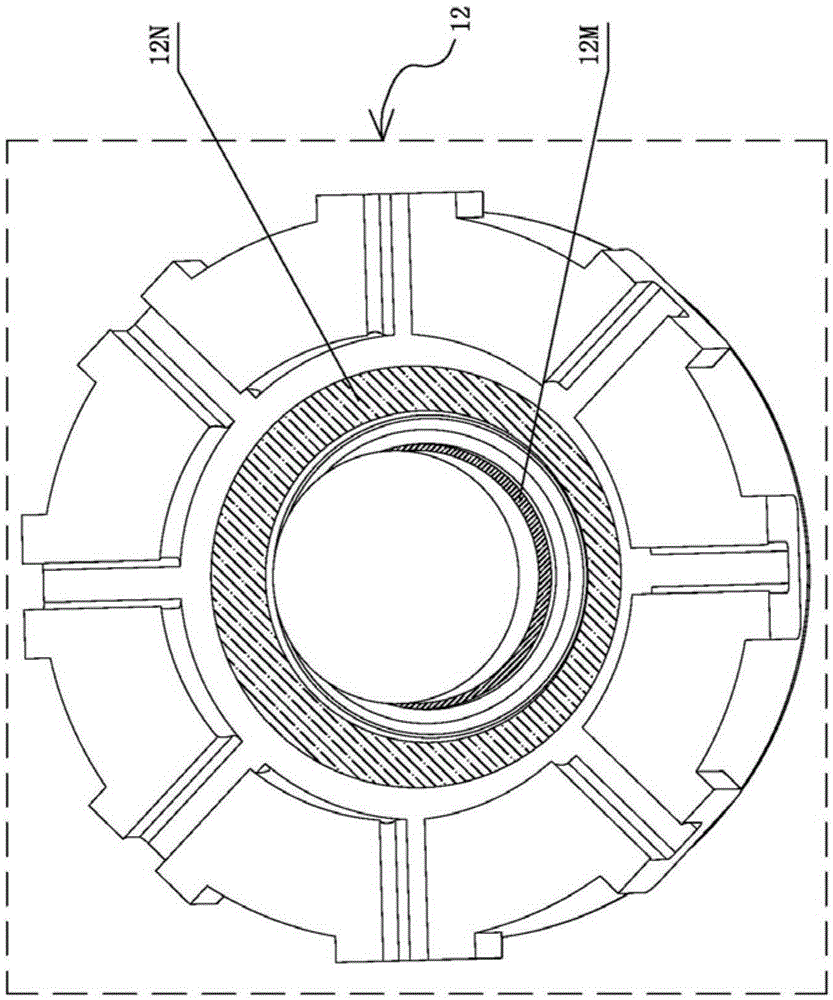
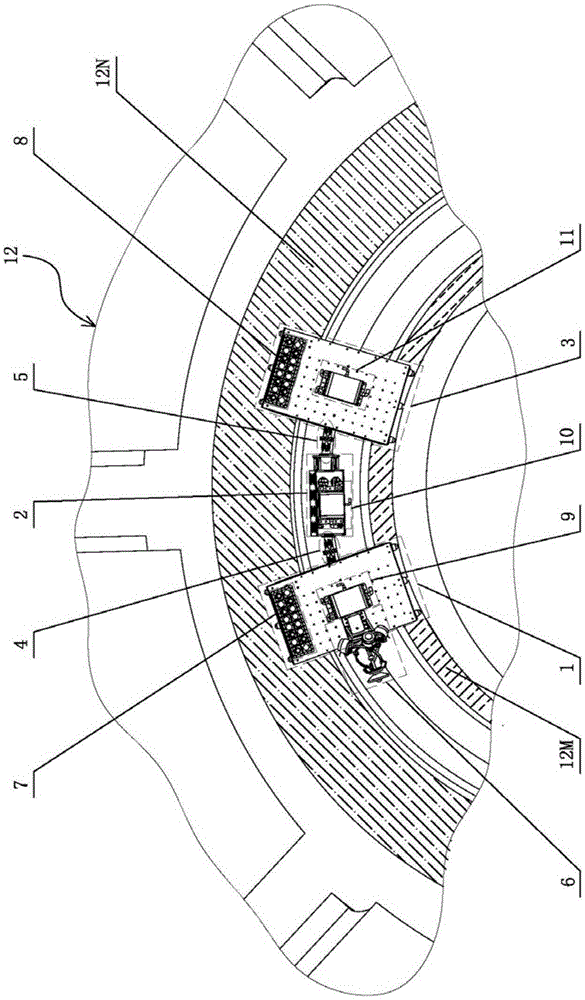
[0077] see figure 1 , figure 2 and image 3 , the structural form of the walking mechanism U1 of the worm-like robot running in the nuclear fusion cabin is: the lateral positioning module 1 of the front body segment and the lateral positioning module 3 of the rear body segment move the axial movement module 2 of the middle body segment The symmetrical arrangement of both ends constitutes the walking mechanism of the worm-like robot; Figure 4 As shown, the structure of the front body segment lateral positioning module 1 is as follows: the electric drive sub-module 1B is fixed inside the bearing sub-module 1A, and has the same structural form of the inner side split support sub-module 1C and the outer side split The support sub-module 1D is symmetrically arranged on the left and right sides of the electric drive sub-module 1B; one end of the inner side split support sub-module 1C and the outer side split support sub-module 1D are respectively fixedly connected to the left an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More