

A Direct Drive Reversible Wafer Transfer Robot
A robot, direct-drive technology, applied in conveyor objects, manipulators, transportation and packaging, etc., can solve the problems of different shafts of transmission shafts, eccentric transmission loads, installation difficulties, etc., achieve high transmission accuracy, reduce intermediate links, Electrically controlled simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Specific embodiments of the present invention will be described in detail below in conjunction with specific drawings.
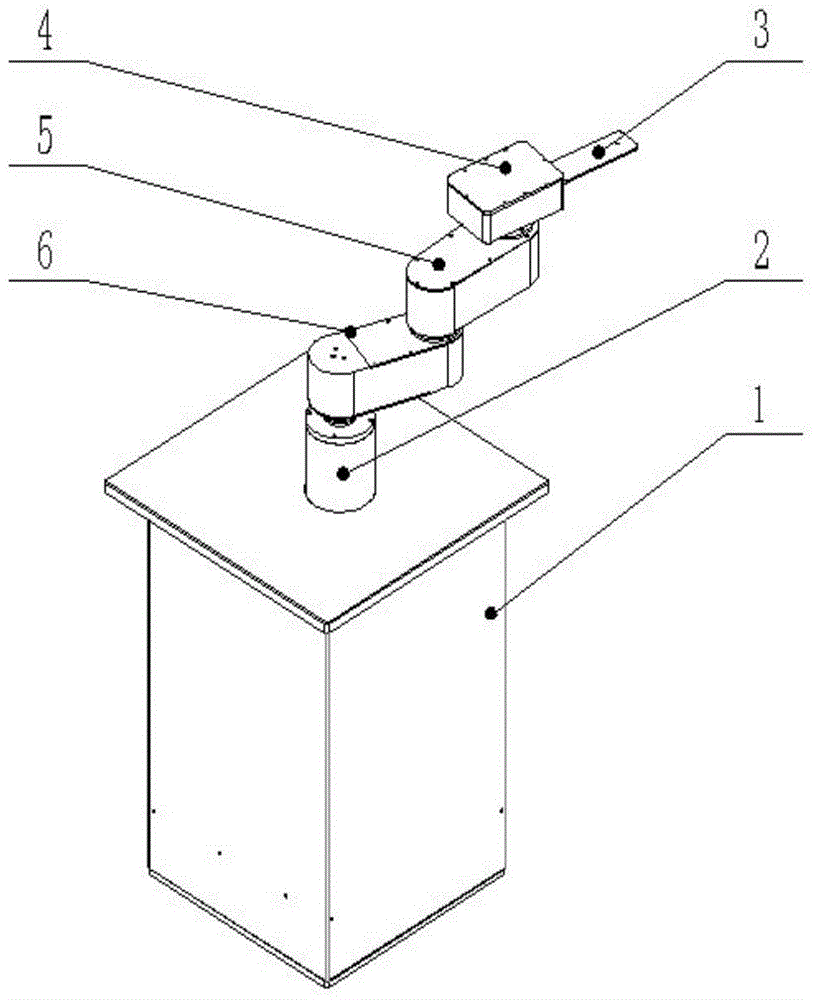
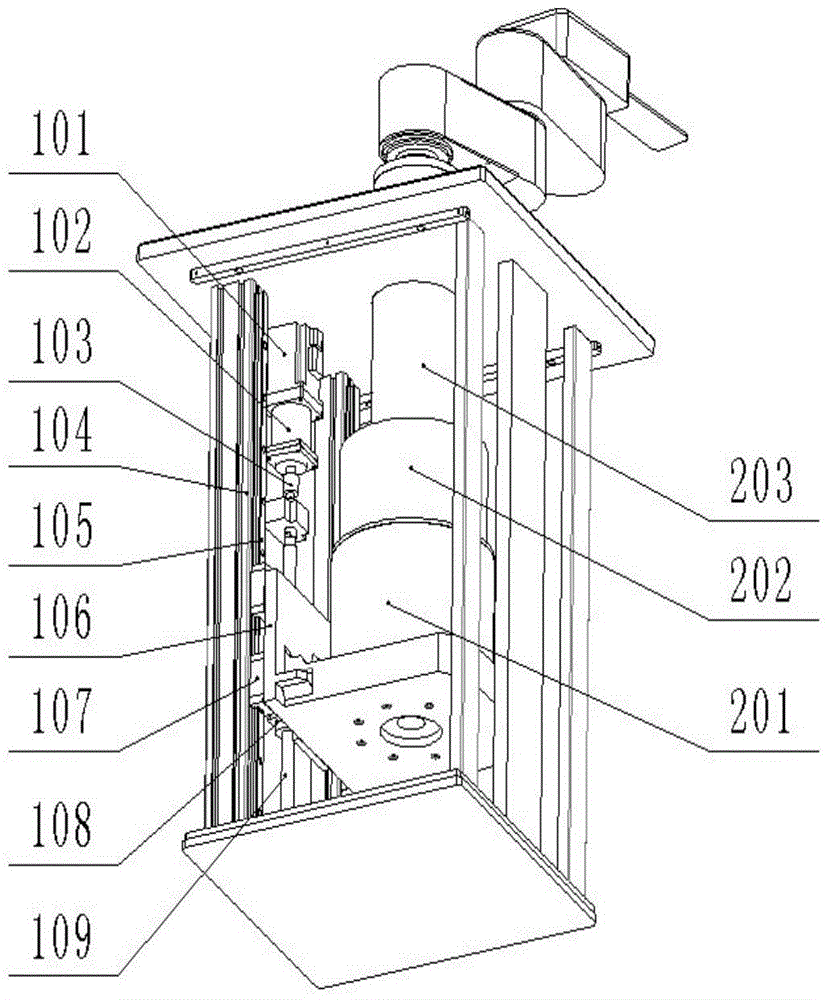
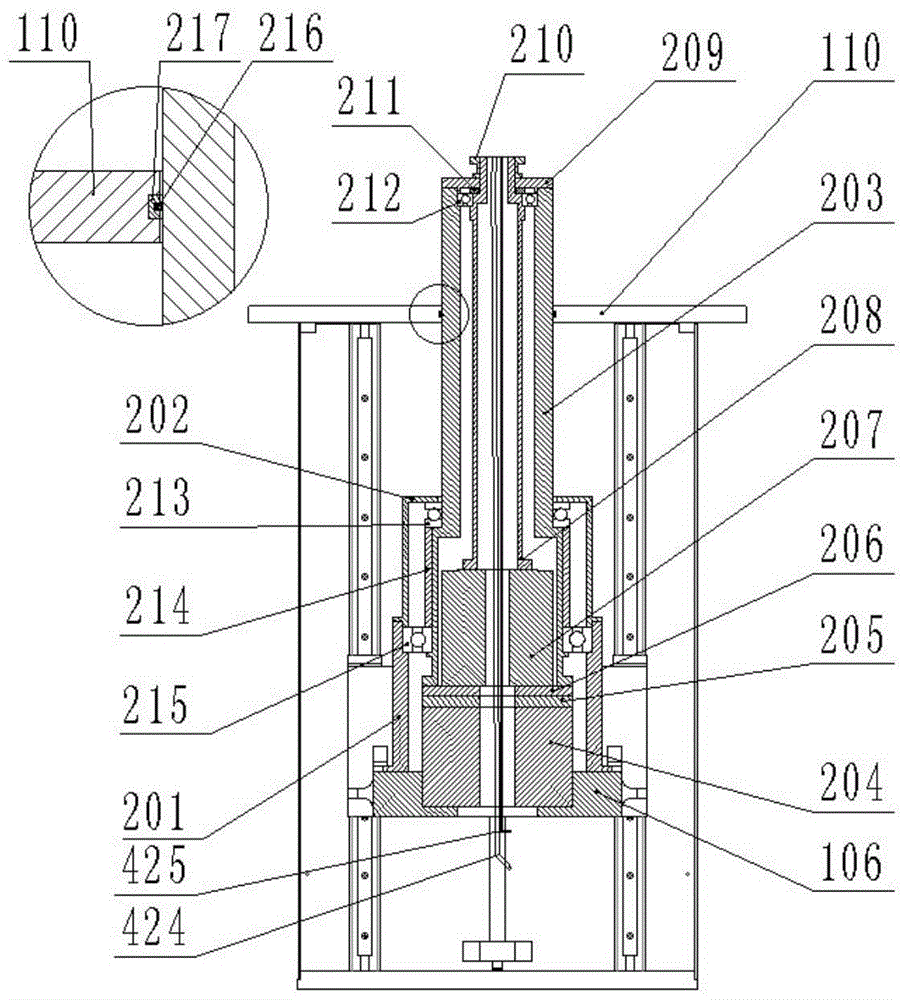
[0040] Such as Figure 1-6 As shown, a direct-drive reversible wafer transfer robot includes a base 1, a lifting and rotating mechanism 2, a vacuum suction end 3, a turning wrist 4, a small arm 5 and a large arm 6; the base 1 Lifting and slewing mechanism 2 is installed inside, and lifting and slewing mechanism 2 is connected with boom 6 one end (near end), and boom 6 other end (far end) is connected with forearm 5 one end (near end), and forearm 5 other end (near end) The far end) is connected with one end of the turning wrist 4, and the other end of the turning wrist 4 is connected with the vacuum suction end 3.
[0041] When the wafer transfer robot moves, the base 1 is fixed, and the lifting and rotating mechanism 2 can rotate around the center of the base 1, and can also perform lifting motion along the vertical direction (Z direction) of the ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More