

An Estimation and Compensation Method for Initial Reference of Inertial Navigation
An inertial navigation and compensation method technology, applied in the field of inertial navigation systems, can solve problems such as large errors, and achieve the effects of eliminating speed and position errors, improving calculation accuracy, and eliminating initial attitude errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
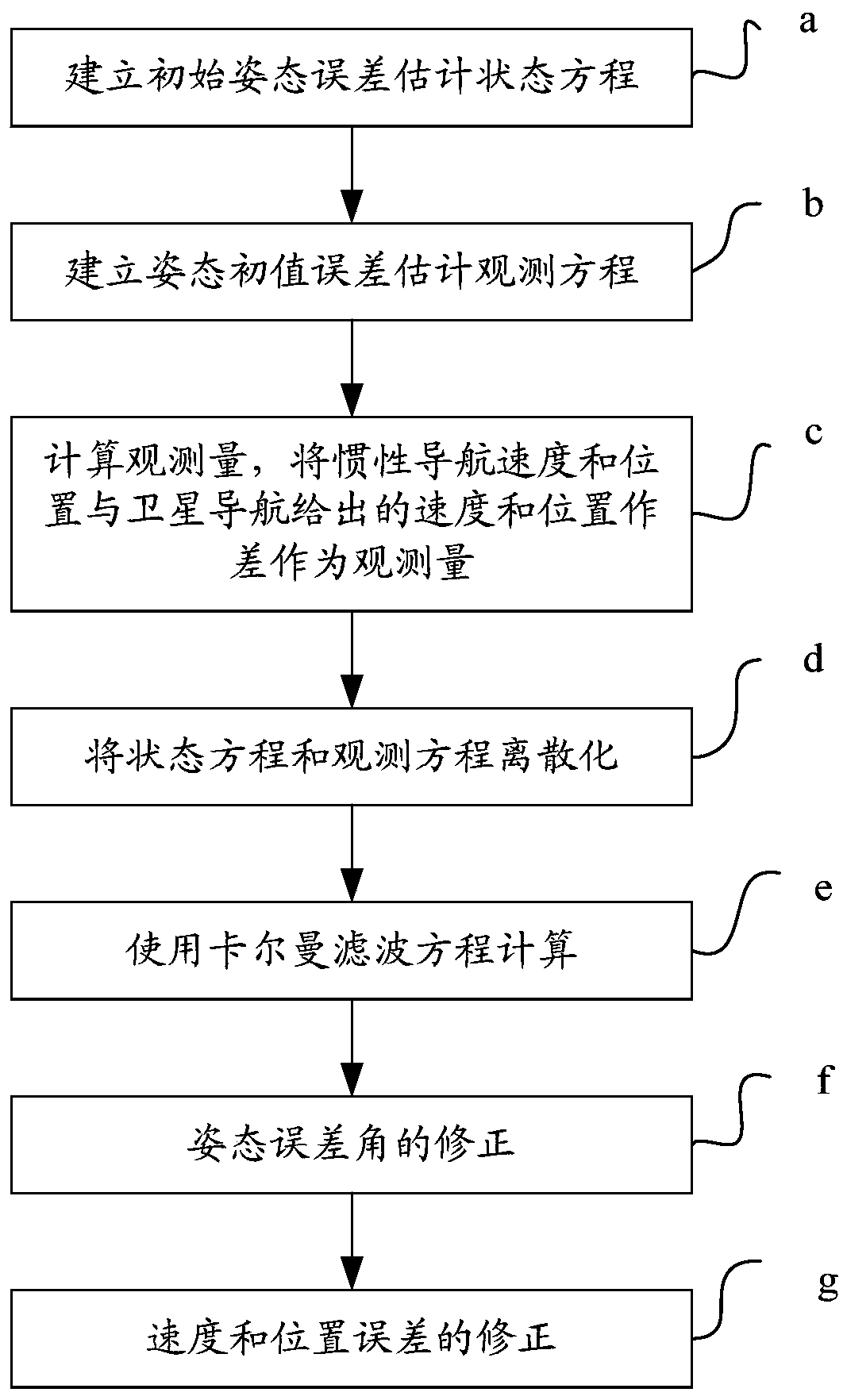
[0058] The principle of the present invention is as follows. According to the position and speed information provided by the satellite navigation and the position and speed information calculated by the inertial navigation, the present invention adopts the method of Kalman filter to estimate the initial reference error of the inertial navigation, and adopts the method of program angle and attitude adjustment in combination with the attitude control requirements when correcting. The attitude angle is corrected, and the speed and position are corrected at the same time.
[0059] The present invention will be further described in detail below in conjunction with the accompanying drawings. figure 1 A flow chart of a method for estimating and compensating a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More