

Method and system for Open-type automation navigation based on robot
A navigation method and technology of a navigation system, which are applied in the field of open automatic navigation methods and systems, can solve the problems that the automatic navigation method cannot be applied to scenes with specific requirements, slow speed, and robot jams, etc., and achieve accurate and controllable navigation and efficient navigation. , the effect of high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
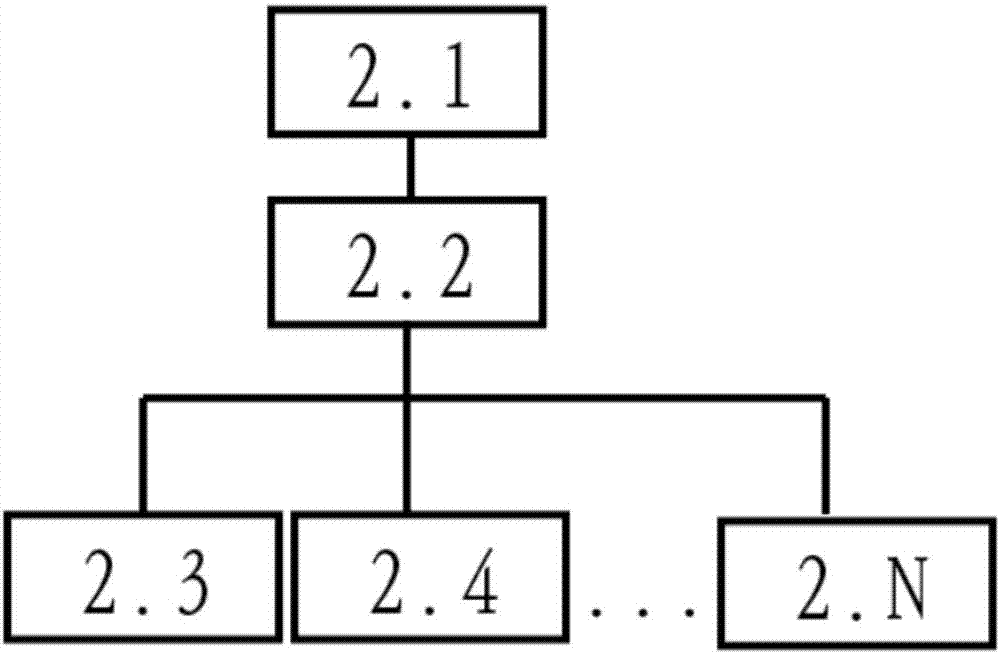
[0100] The controller 2.1 is a motherboard based on a processor with high computing speed, and its essence is the hardware of an industrial computer. The controller adopts the ROS software package based on the Linux system and can run multiple nodes. The installation location is as follows: Figure 5 Shown in 5.3.
[0101] The single-chip processor 2.2 communicates with each sensor device 2.3-2.N through the IO port or the specified protocol of the sensor device 2.3-2.N, and the installation location is as follows: Figure 5 Shown in 5.4. After the sensor devices 2.3-2.N acquire data, the internal program of the single-chip processor 2.2 is used to perform initial processing on various data uploaded by the sensor devices 2.3-2.N, and upload the processed data to the controller 2.1. In the precise navigation area, the controller suspends the path planning function, and the robot realizes the movement along the high-gloss reflection strip by the single-chip processor and the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More