Autonomous navigation omnidirectional vehicle control system based on Mecanum wheel
A technology of autonomous navigation and control system, applied in control/adjustment system, two-dimensional position/channel control, vehicle position/route/altitude control and other directions, which can solve problems such as the inability to exert characteristics and restrict movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
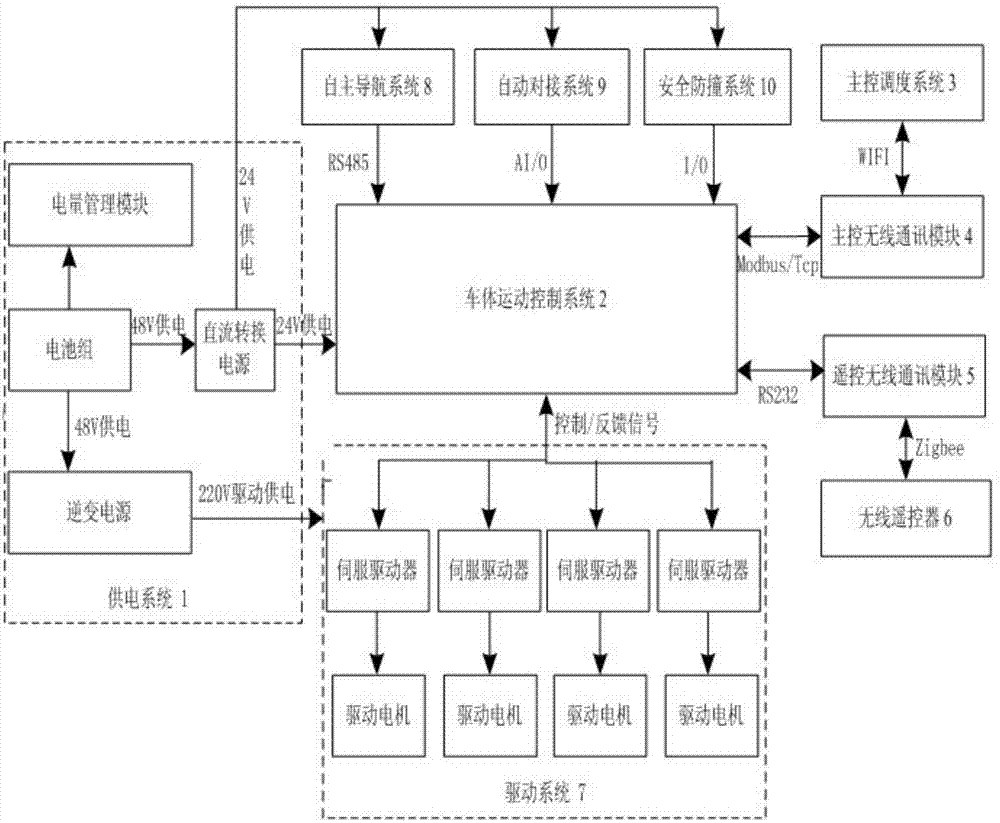
[0038] like figure 1 As shown, a control system of a mecanum wheel autonomous navigation transfer vehicle (omnidirectional transfer vehicle) according to the present invention, the omnidirectional transfer vehicle adopts a mecanum wheel design, the front wheel has a suspension system, and the upper end of the transfer vehicle is connected to Bracket with guide rails, the upper end of the bracket is loaded with transshipment products and parts, the omnidirectional autonomous transfer vehicle control system adopts the vehicle body servo motion control system combined with the visual navigation positioning system and automatic docking system to realize the vehicle body according to the main control scheduling system Set t...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More