

Parallel connection mechanism with five freedom degrees of two movement and three rotation
A technology with three degrees of freedom and three rotations, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve many problems and achieve the effects of easy production and processing, simple mechanism structure and novel structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the solutions of the present invention will be further described.
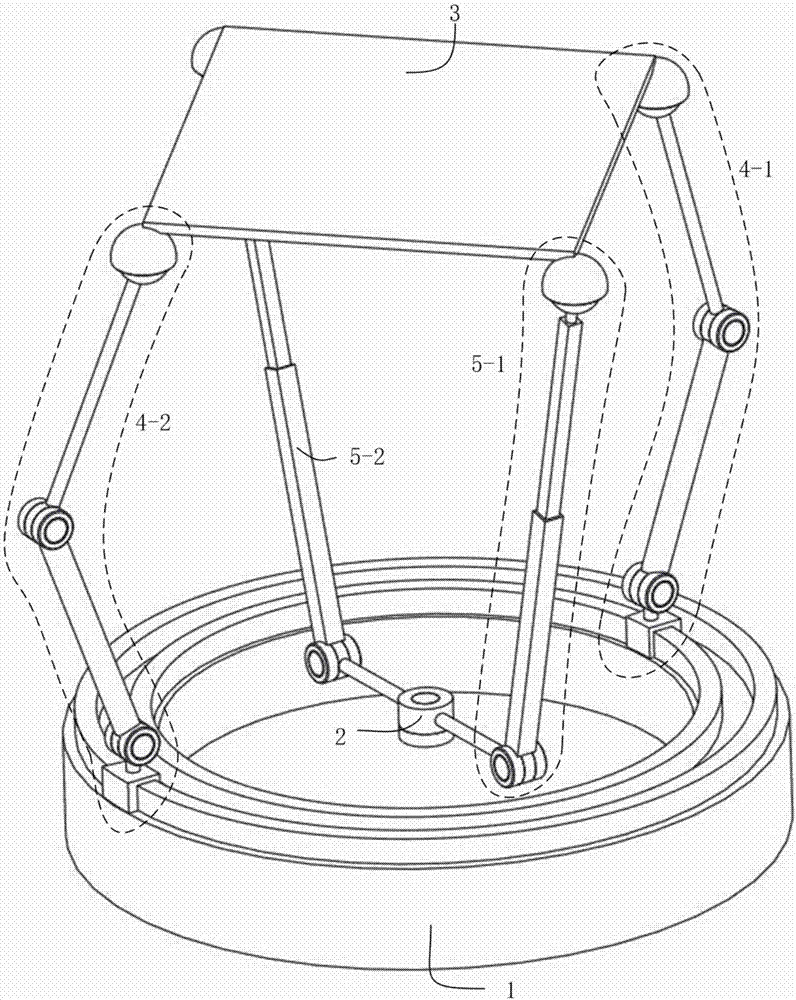
[0022] Such as figure 1 Shown is a five-degree-of-freedom parallel robot mechanism, which includes: a fixed platform 1, four branch chains (4-1, 4-2, 5-1, 5-2), and a central symmetrical rotating rod 2 (already Included in branch chain 5-1 and 5-2), moving platform 3. Four branch chains are distributed between the moving platform and the fixed platform, among which branch chain 5-1 and branch chain 5-2 are symmetrically distributed at 180°, and their structures are completely consistent. The branch chain 4-1 and the branch chain 4-2 are all the same except for the sliding radius of their sliders, and the two branch chains do not interfere with each other in motion.
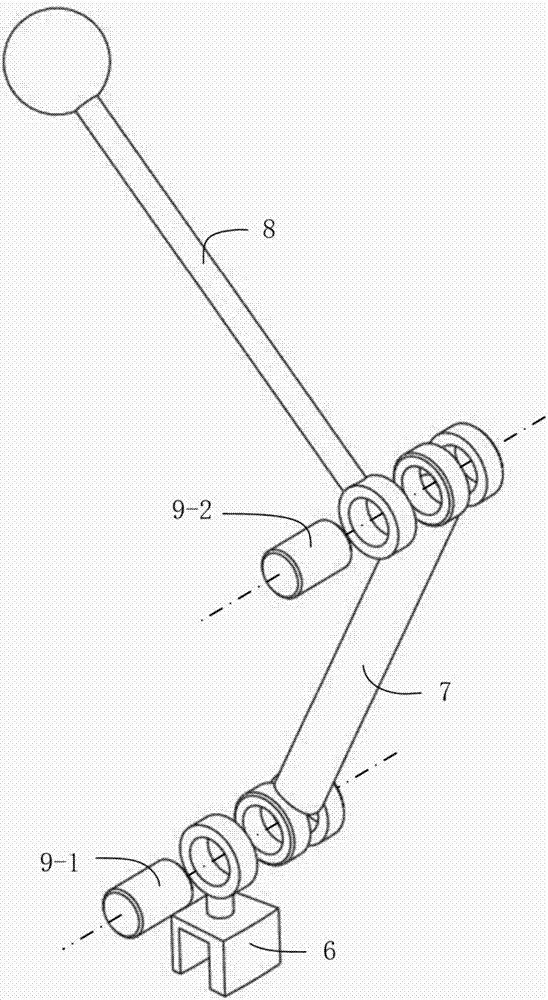
[0023] The first type of branch chain (branch chain 4-1, 4-2) includes: including: arc slider (6, 10), two ends of rotating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More