

Method and apparatus of controlling unmanned planes on account of model
A technology for drones and models, applied in the field of electronics, can solve problems such as poor stability and robustness, and achieve the effect of improving stability and robustness and solving poor stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
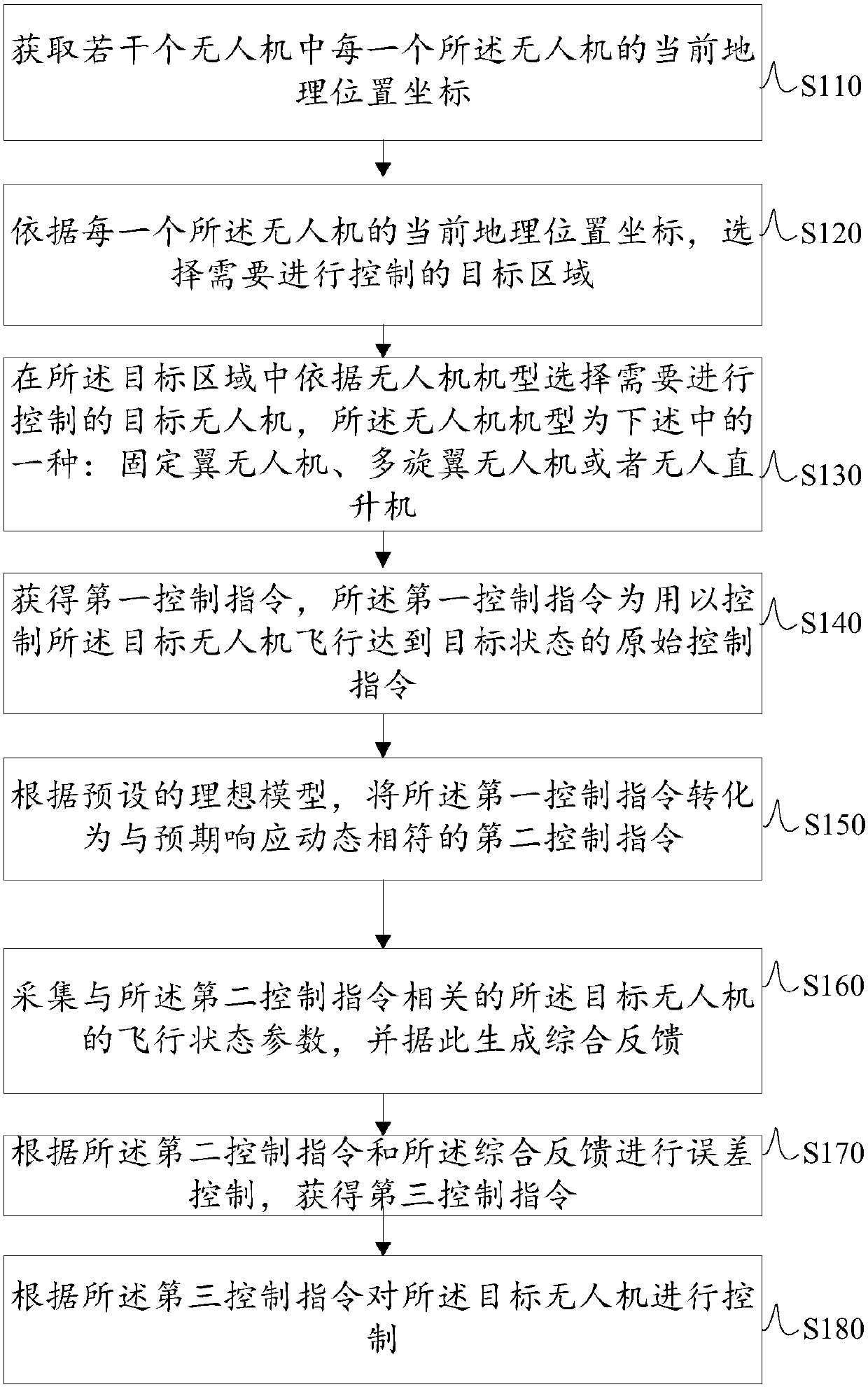
[0083] The first aspect of the present invention provides a method for controlling the UAV according to the model, please refer to figure 1 , is a flow chart of a method for controlling an unmanned aerial vehicle for a model in an embodiment of the present invention. The method includes:
[0084] S110: Obtain the current geographic location coordinates of each of the drones in several drones;
[0085] S120: Select a target area to be controlled according to the current geographic location coordinates of each of the drones;
[0086] S130: In the target area, select the target UAV that needs to be controlled according to the UAV type, and the UAV type is one of the following: fixed-wing UAV, multi-rotor UAV or unmanned helicopters;
[0087] Specifically, according to the current geographic location coordinates of each of the drones, selecting the target area to be controlled specifically includes the following sub-steps: according to the current geographic location coordinate...
Embodiment 2
[0127] Based on the same inventive concept as the method for controlling a drone in the aforementioned first aspect, Embodiment 2 of the present invention also provides a control device for a drone, such as figure 2 shown, including:
[0128] The current geographic location coordinates acquisition module is used to acquire the current geographic location coordinates of each of the drones in several drones;
[0129] A target area selection module, configured to select a target area to be controlled based on the current geographic location coordinates of each of the drones;
[0130] The target drone selection module is used to select the target drone that needs to be controlled according to the drone model in the target area, and the drone model is one of the following: fixed-wing unmanned aerial vehicles drones, multi-rotor UAVs or unmanned helicopters;
[0131] The first obtaining module is used to obtain the first control instruction, and the first control instruction is t...
Embodiment 3
[0149] Based on the same inventive concept as the method for controlling the drone in the first embodiment, the third embodiment of the present invention also provides a computer-readable storage medium, such as figure 2 As shown, there is stored thereon a computer program which, when executed by a processor, implements the following steps:
[0150] Acquiring the current geographic location coordinates of each of the drones in the plurality of drones;
[0151] Select a target area to be controlled according to the current geographic location coordinates of each of the drones;
[0152] In the target area, select the target UAV that needs to be controlled according to the UAV type, and the UAV type is one of the following: fixed-wing UAV, multi-rotor UAV or unmanned aerial vehicle man helicopter;
[0153] Obtaining a first control instruction, the first control instruction is an original control instruction used to control the target UAV to fly to a target state;
[0154] conv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More