

Flight control system for medium-high-speed and large-maneuvering unmanned aerial vehicle
A flight control system and UAV technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve the problem that the safety and reliability of UAVs cannot be guaranteed, and the large maneuvering flight of UAVs cannot be applied. environment, increasing the difficulty of UAV flight control, etc., to achieve the effect of less stringent requirements for modeling accuracy, sensor measurement accuracy and stability, simple algorithm, and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0037]为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。
[0038]应当明确,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0039]针对现有技术的不足,本发明针对中高速、大机动无人机的控制难点提供一种飞行控制方法,该方法根据无人机飞行控制所需的俯仰、滚转及偏航力矩,构建各操纵通道控制策略,将各通道需要解决的系统问题与控制功能进行模块化设计,削弱各通道之间的耦合效应,提升无人机高速、机动飞行中任务指令跟踪的快速性、准确性和稳定性,实现飞行控制系统对外界干扰及不确定性等情况良好的容忍能力。
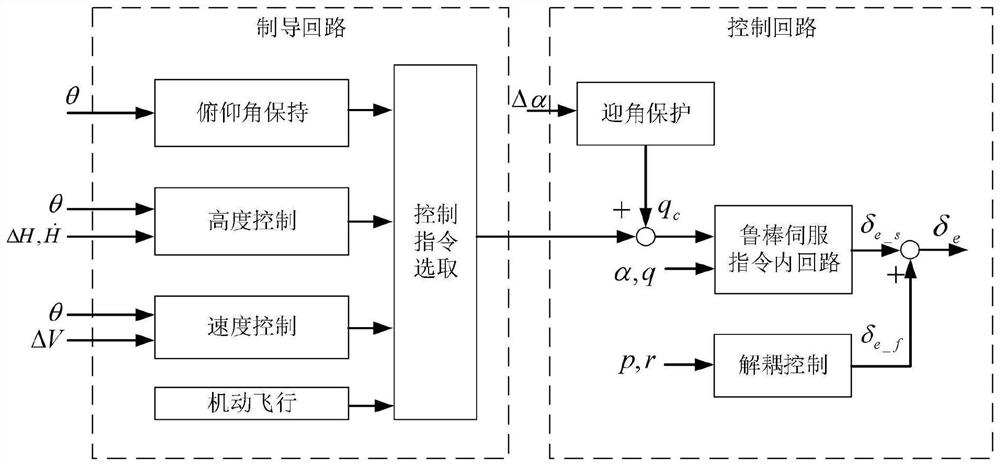
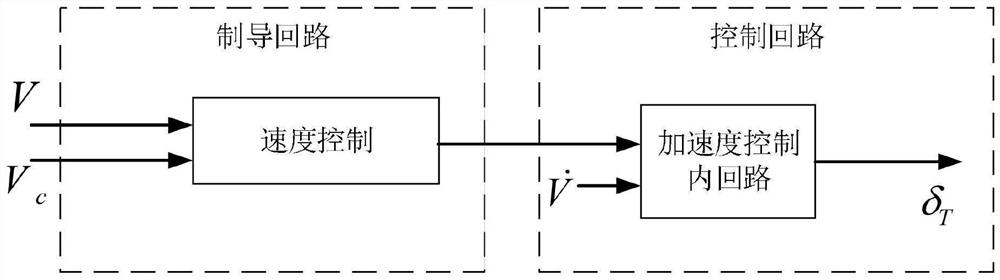
[0040]根据本发明实施例的一个具体实现方式,其技术方案包括:首先基于无人机动力学和运动学模型,分析无人机的操纵通道及耦合效应。其次基于鲁棒伺服控制理论设计角速率指令内回路,构建无人机的纵向、横侧向飞行控制系统。按照控制功能将各控制通道模块化,将每个通道分解为增稳、解耦、指令内回路、保护机制、制导回路等模块,依次设计不同模块的控制结构及实现方式,形成无人机完整的飞行控制方法,并在全包线范围内实现增益调度。
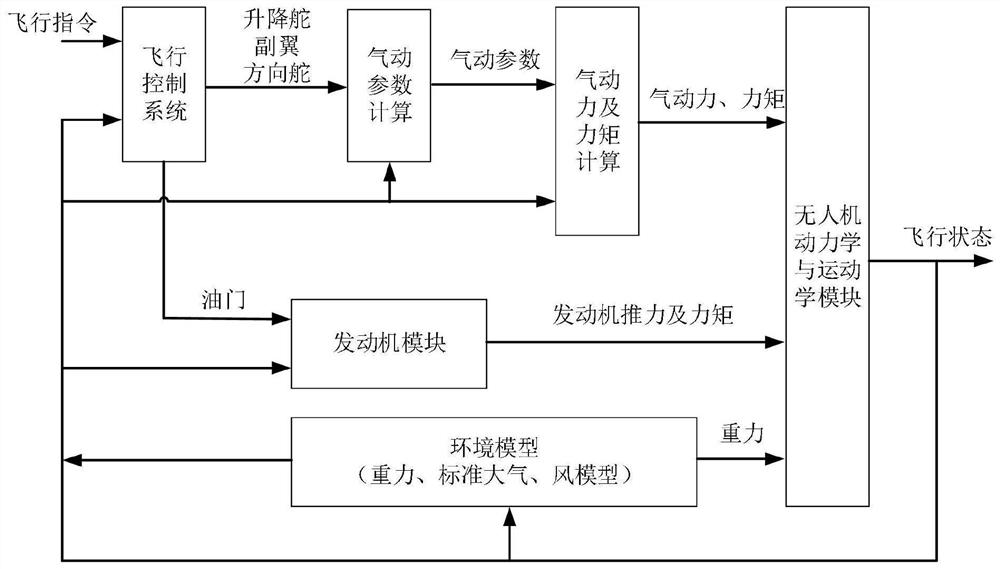
[0041]根据本发明实施例的一个具体实现方式,无人机飞行控制系统实现示意图如图1所示。中高速、大机动无人机的气动布局与传统低速无人机大同小异,不论是采用常规尾翼还是V型尾翼,其操纵通道均可以重构为升降舵δe、副翼δa、方向舵δr和油门δT4项。其中升降舵δe通道和油门δT通道控制无人机的纵向运动,副翼δa通道和方向舵δr通道控制无人机的横侧向运动,两种运动之间存在耦合效应。
[0042]步骤1针对耦合效应分析:
[0043]通过无人机动力学和运动学模型可以分析得出,无人机的耦合效应分为三种:操纵耦合、惯性耦合和运动耦合。在常规飞行中,动态过程平稳,机体存在的耦合效应均可忽略不计,但是在机动飞行中须重点考虑,其直接影响无人机机动飞行的飞行控制品质。
[0044]无人机的操纵耦合特性主要表现为方向舵与副翼之间的操纵交叉耦合,根据受力原理,耦合较为明显的是方向舵操纵产生的附加滚转力矩。作为本发明的一种优选方案,在副翼控制通道中采用舵面交联方式进行补偿,其实质是利用副翼舵量克服方向舵产生的操纵交叉滚转力矩,具体方法见无人机横侧向控制...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More