

An elbow joint of a mechanical arm and its action method
A technology of elbow joints and robotic arms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of uncompactness, high cost, and complicated mechanical arm settings, and achieve low cost, convenient operation, and compact design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
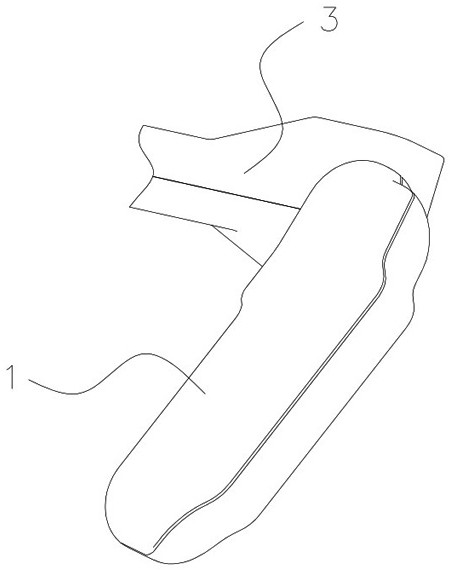
[0035] exist figure 1 , figure 2 , image 3 In the illustrated embodiment, an elbow joint of a mechanical arm includes:
[0036] Boom 1, a support arm used to realize the action of the elbow joint; a mounting seat 2 is arranged inside the big arm 1;
[0037] The forearm 3 is connected with the big arm 1 to realize the execution part of the elbow joint action;
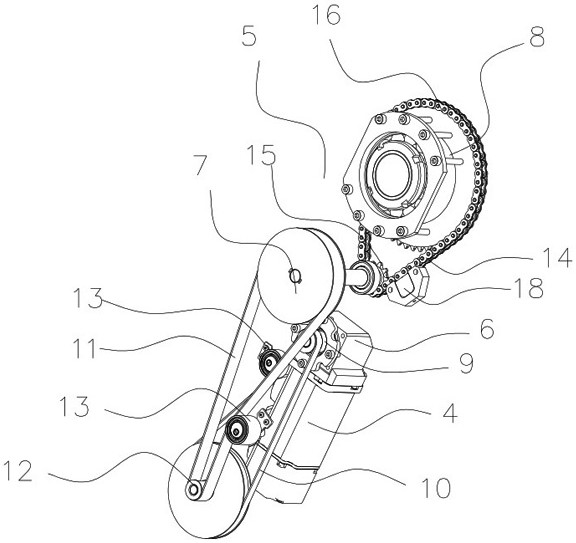
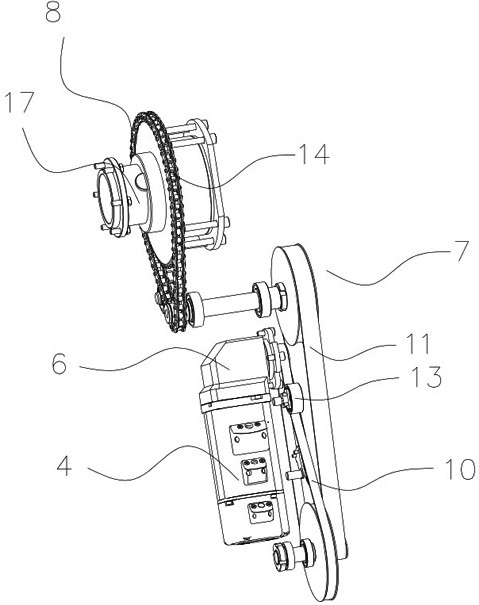
[0038] The driving assembly 4 is arranged inside the mount 2 as a driving component for realizing the action of the elbow joint;
[0039] The transmission assembly 5 is set inside the installation seat 2 and transmits the driving force of the drive assembly 4 to the transmission part of the small arm 3; the transmission assembly 5 includes a right-angle planetary reducer 6, a belt transmission 7 and a chain transmission 8 connected in sequence; the chain The transmission 8 is connected with the forearm 3 and drives the forearm 3 to move to realize the driving of the elbow joint.
[0040] The drive assembly 4 is a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More