

A control method for a separate sweeping robot
A technology of a sweeping robot and a control method, which is applied to manual sweeping machinery, carpet cleaning, floor cleaning, etc., can solve the problem of no substantial improvement in the cleaning speed, and achieve the improvement of cleaning speed and efficiency, efficient charging, and improving cleaning efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
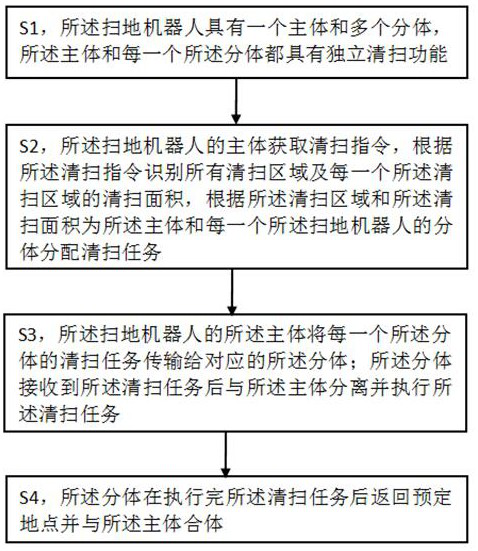
[0037] Such as figure 1 As shown, the present invention provides a control method for a separate sweeping robot, the method comprising the following steps:
[0038] S1, the sweeping robot has a main body and a plurality of split bodies, the main body and each of the split bodies have independent cleaning functions; it should be noted that the main body and each of the split bodies together form a whole For example, the main body and each of the sub-parts are fan-shaped and together form an overall circular shape, thus ensuring the overall aesthetics. In addition, the main body is electrically connected to each of the split bodies, and the main body has a main controller to control operations such as cleaning and charging of itself and each split body.
[0039]S2, the main body of the sweeping robot acquires a cleaning instruction, identifies all cleaning areas and the cleaning area of each cleaning area according to the cleaning instruction, and provides the main body and e...
Embodiment approach
[0051] As a preferred embodiment, it also includes:
[0052] The main body and each of the split bodies have the same cleaning efficiency; it should be noted that, for example, the cleaning efficiency may be cleaning power, that is, the hardware configuration is the same.
[0053] If the number of the cleaning area is less than or equal to the sum of the number of the main body and the split body, then assign one of the split body or the main body to each of the cleaning areas to perform the cleaning task; according to each The ratio of the cleaning path to all cleaning paths in the cleaning area allocates the remaining main body or the sub-body to the cleaning area. It should be noted that, for example, the number of cleaning areas in the family scene is 4, and the length of the cleaning path in descending order is: living room area>master bedroom area>secondary bedroom area>study area The sum of the number of the main body and the split body of the sweeping robot is 6, at t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More