

Vision-based double-robot relative pose online calibration method
A relative pose and dual-robot technology, applied to instruments, measuring devices, and optical devices, can solve the problems of complicated preparation work, high manual participation, and slow calibration speed, and achieve high automation, strong applicability, and fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
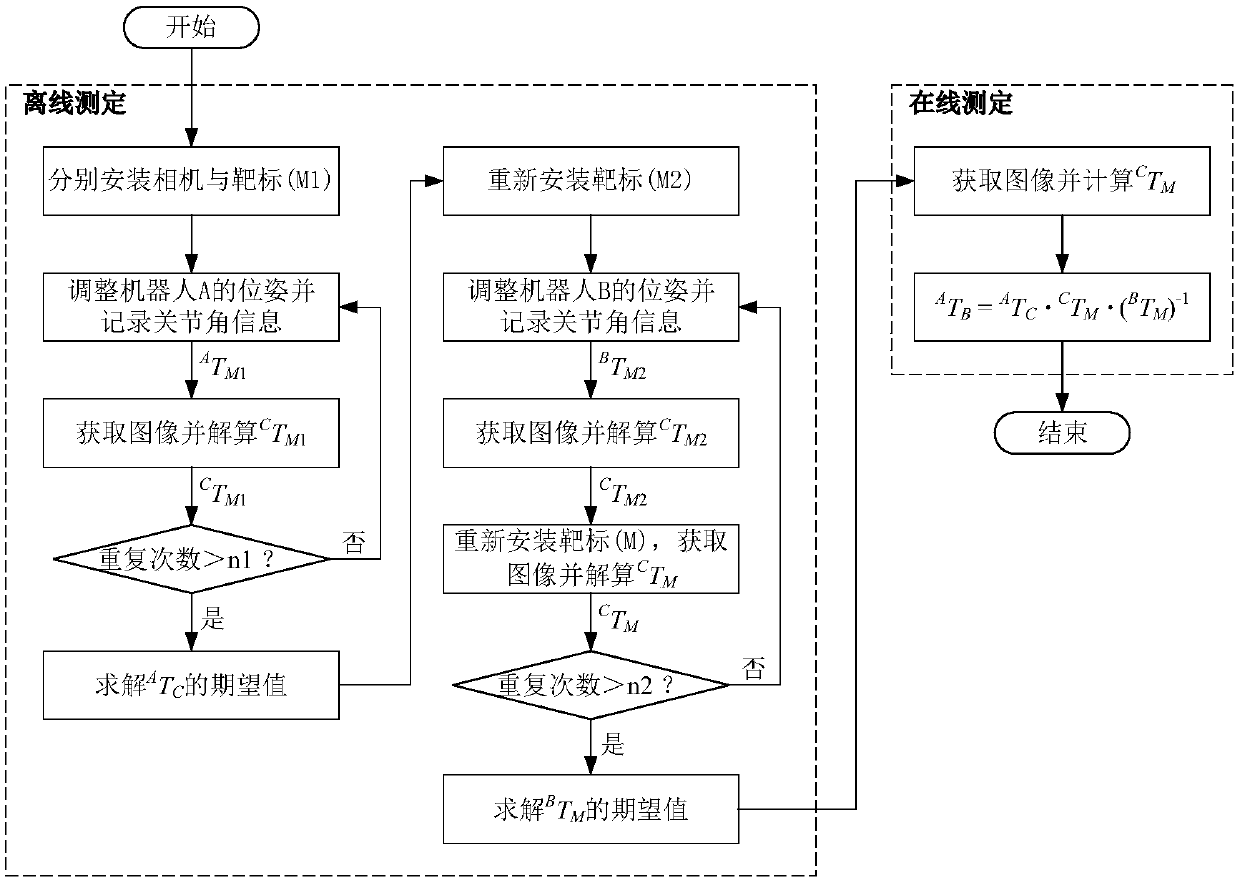
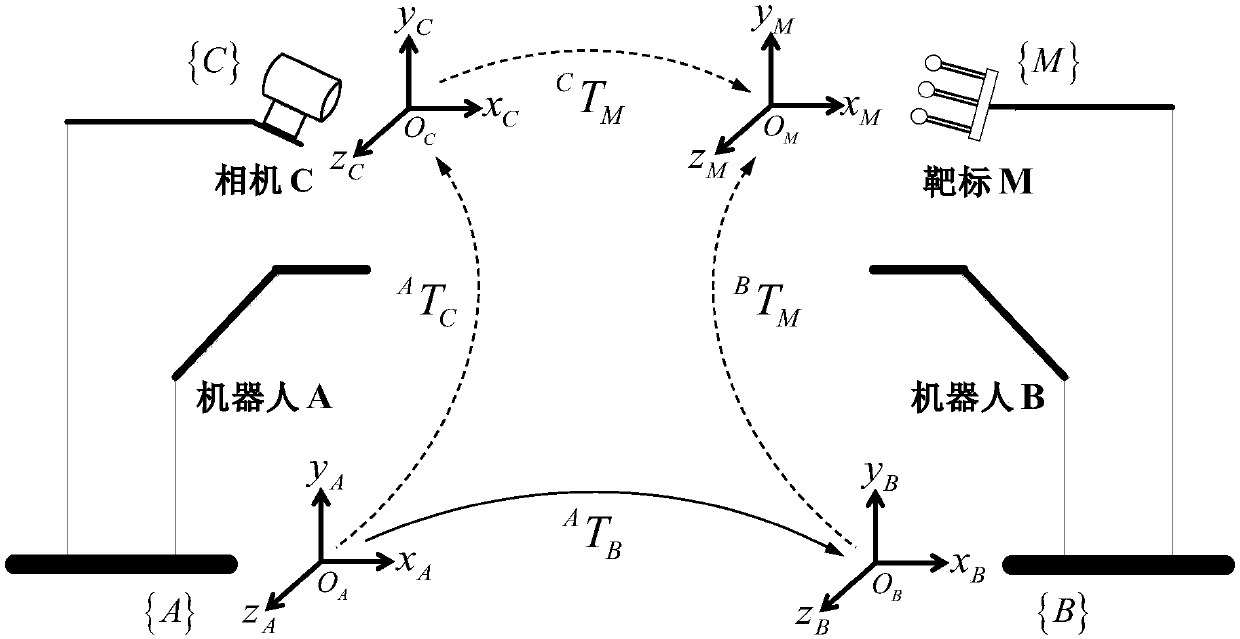
[0041] Such as figure 1 As shown, the embodiment of the present invention provides a vision-based online calibration method for the relative pose of dual robots. The calibration method uses a camera C (with known internal parameters) and a target M (with known design parameters, on which there are at least three Marking points that are not collinear and have known relative positions) construct ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More