

AUV movement data collection algorithm in underwater sensor network based on data prediction
A mobile data collection and data prediction technology, which is applied in the field of AUV mobile data collection algorithms, can solve the problems of shortening the AUV traversal path length, accelerating the collection process, and depreciation of information value, so as to reduce node transmission energy consumption, high feasibility, and low The effect of collection delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
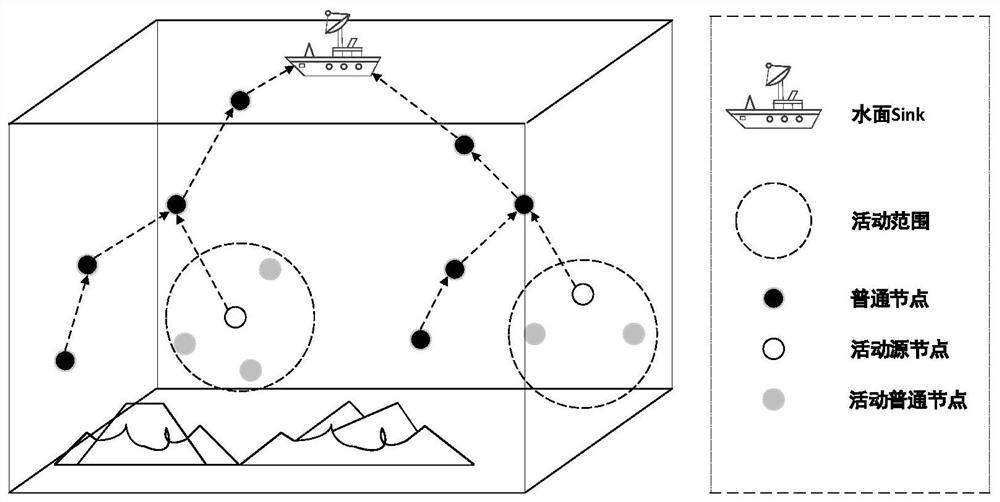
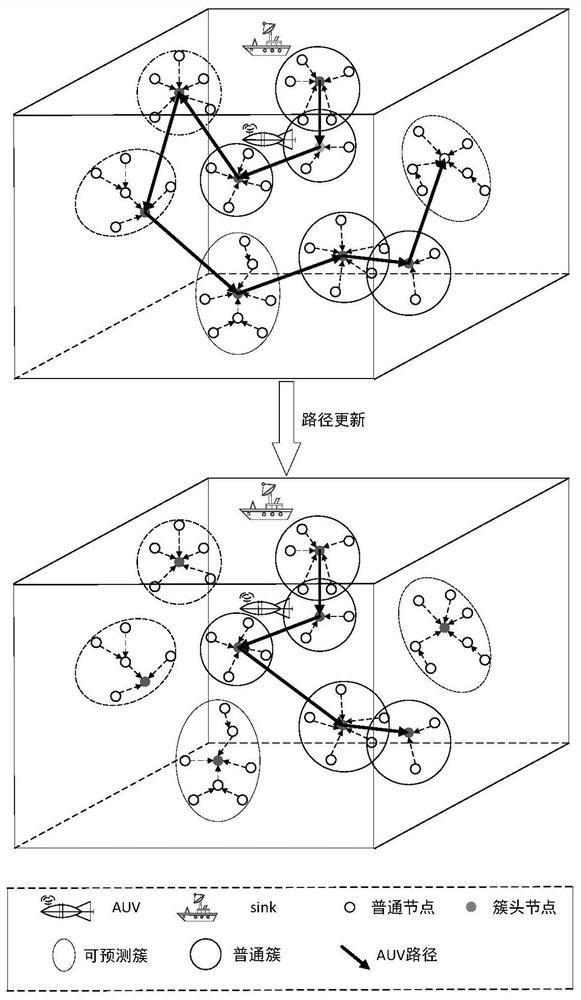
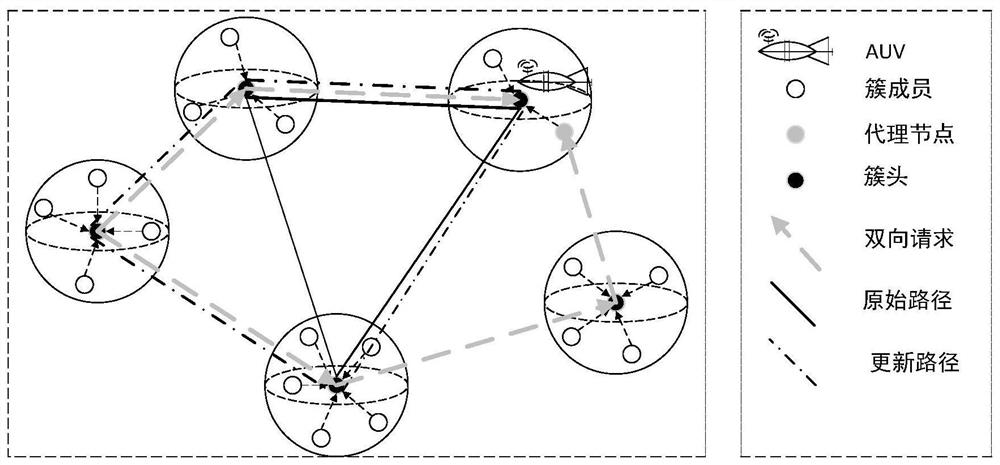
[0053] Aiming at the problem of excessive delay in AUV mobile data collection, the present invention uses SVR to update the cluster structure to form a special type of cluster—a predictable cluster. The AUV can avoid repeated access to the predictable cluster by obtaining the corresponding prediction model, thus shortening the length of the collection path. Specifically: the AUV receives the competition coefficients of all clusters in the initial stage, selects the maximum competition coefficient as the starting point, and starts data collection with the shortest path; after the AUV has visited the predictable cluster, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More