

Underactuated mechanical arm layering sliding mode control method based on fuzzy optimization
A technology of fuzzy optimization and manipulators, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of the hierarchical sliding mode control method, such as steady-state time and control accuracy, which need to be optimized urgently, and achieve the effect of solving chattering problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0063] It should be clear that the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
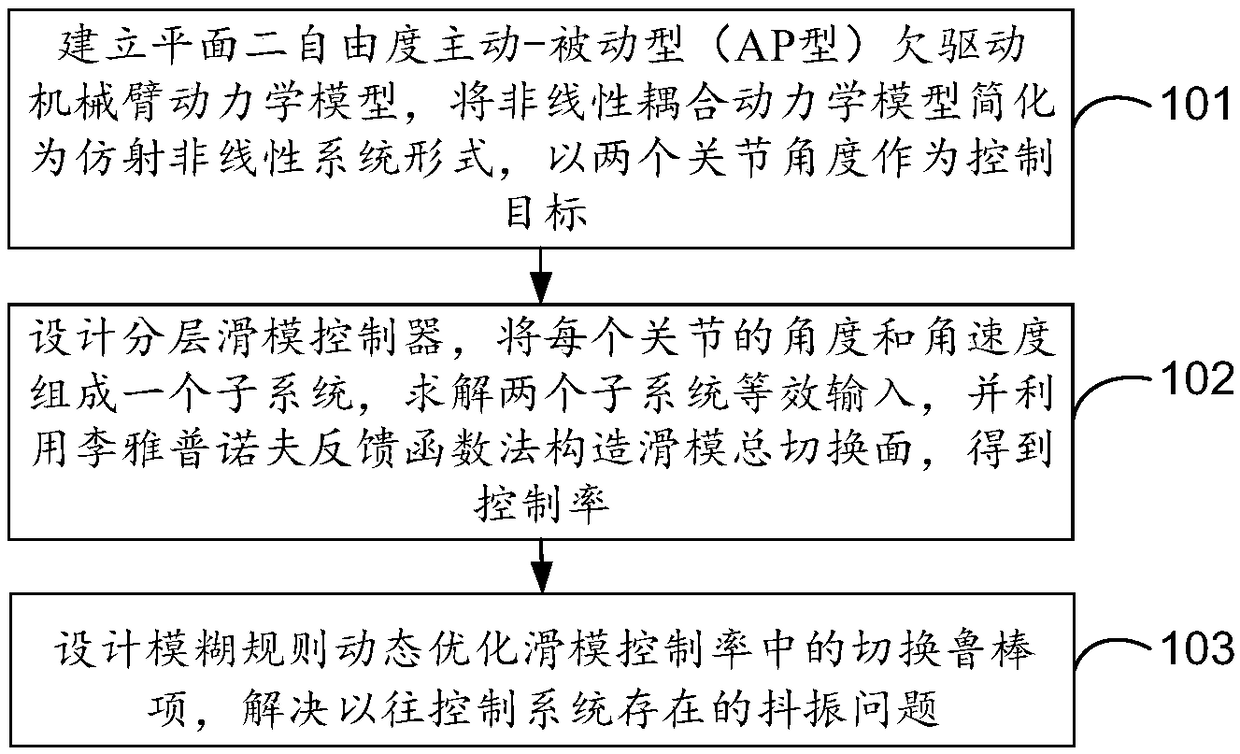
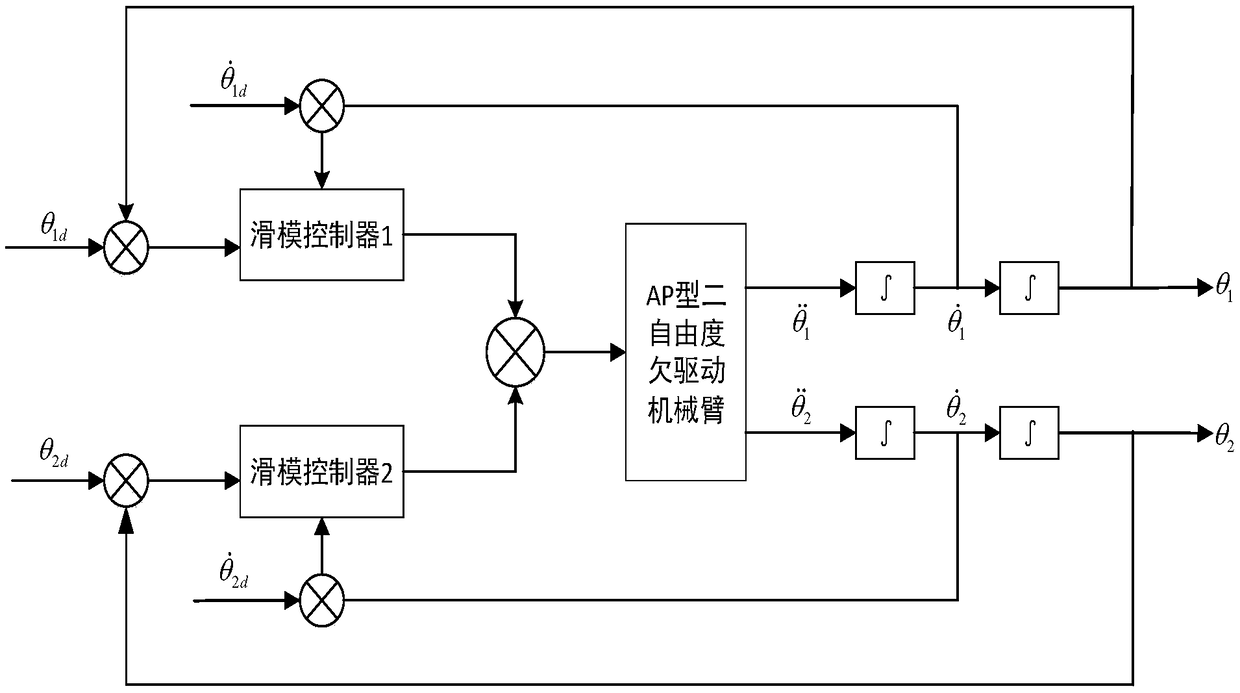
[0064] The hierarchical sliding mode control method of underactuated manipulator based on fuzzy optimization includes the following steps:
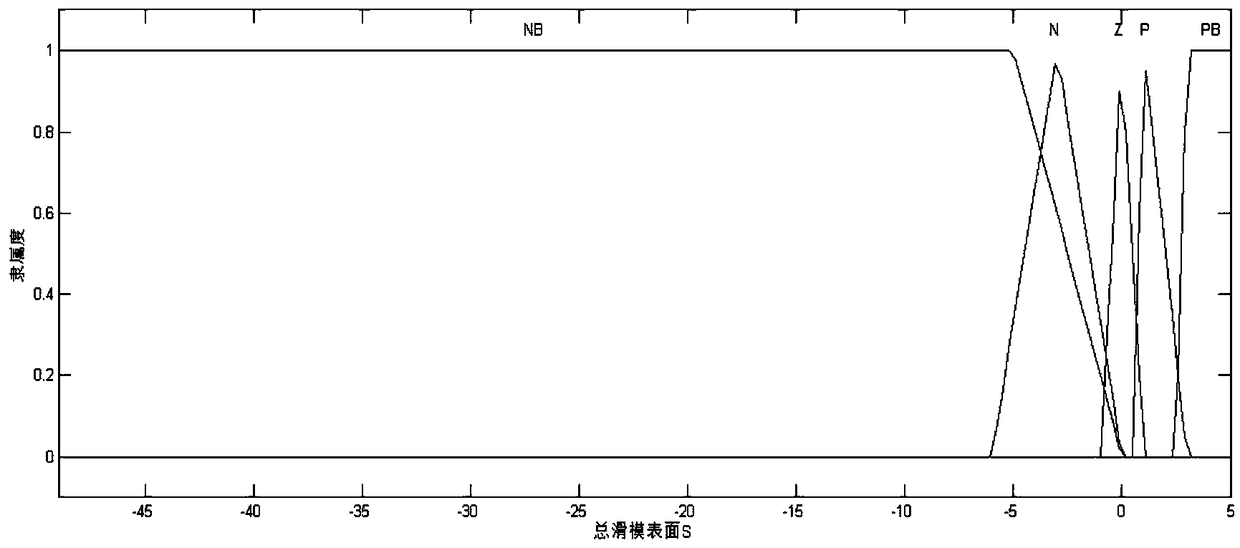
[0065] 1. Establish a planar two-degree-of-freedom active-passive (AP-type) underactuated manipulator dynamics model, simplify the nonlinear coupling dynamics model into an affine nonlinear system form, and take two joint angles as control targets; 2. Design a layered sliding mode controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More