

Quadruped robot and leg joint structure
A quadruped robot and joint structure technology, applied in the field of robotics, can solve the problems of limited hydraulic cylinder stroke, difficulty in passing tasks for high-load quadruped robots, and insufficient joint flexibility, achieving reasonable stress, shortened dynamic response time, smooth motion effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to better understand the present invention, the invention will be described in detail below in conjunction with the accompanying drawings and specific examples.
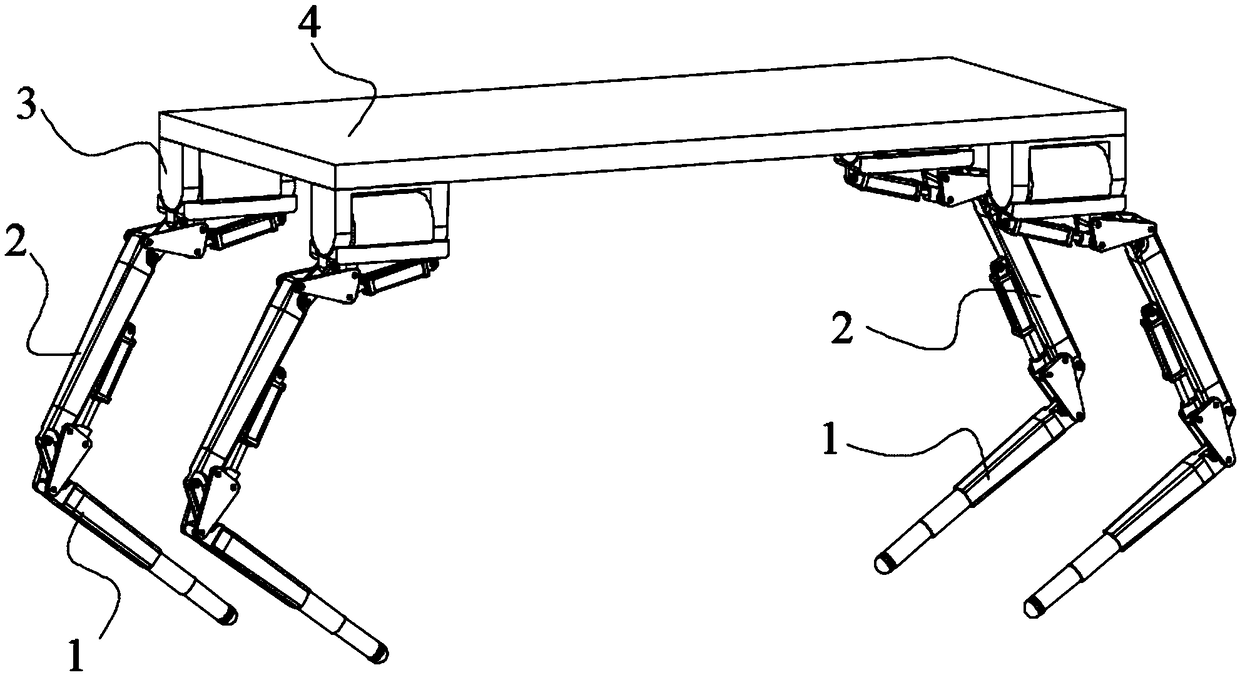
[0024] The whole quadruped robot is composed of calf 1, thigh 2, side swing 3 and robot platform 4. The side swing 3 is fixedly installed on the bottom of the four corners of the robot platform 4. The thigh 2 is installed on the side swing 3 through bending joints. The top of the calf 1 The leg joint structure is installed on the bottom of the thigh 2, and the bottom of the lower leg 1 walks on the ground. The gaits of walk, trot, pace, bound, and rotary gallop can be performed, and obstacles of a certain height or width can be crossed or stepped over.
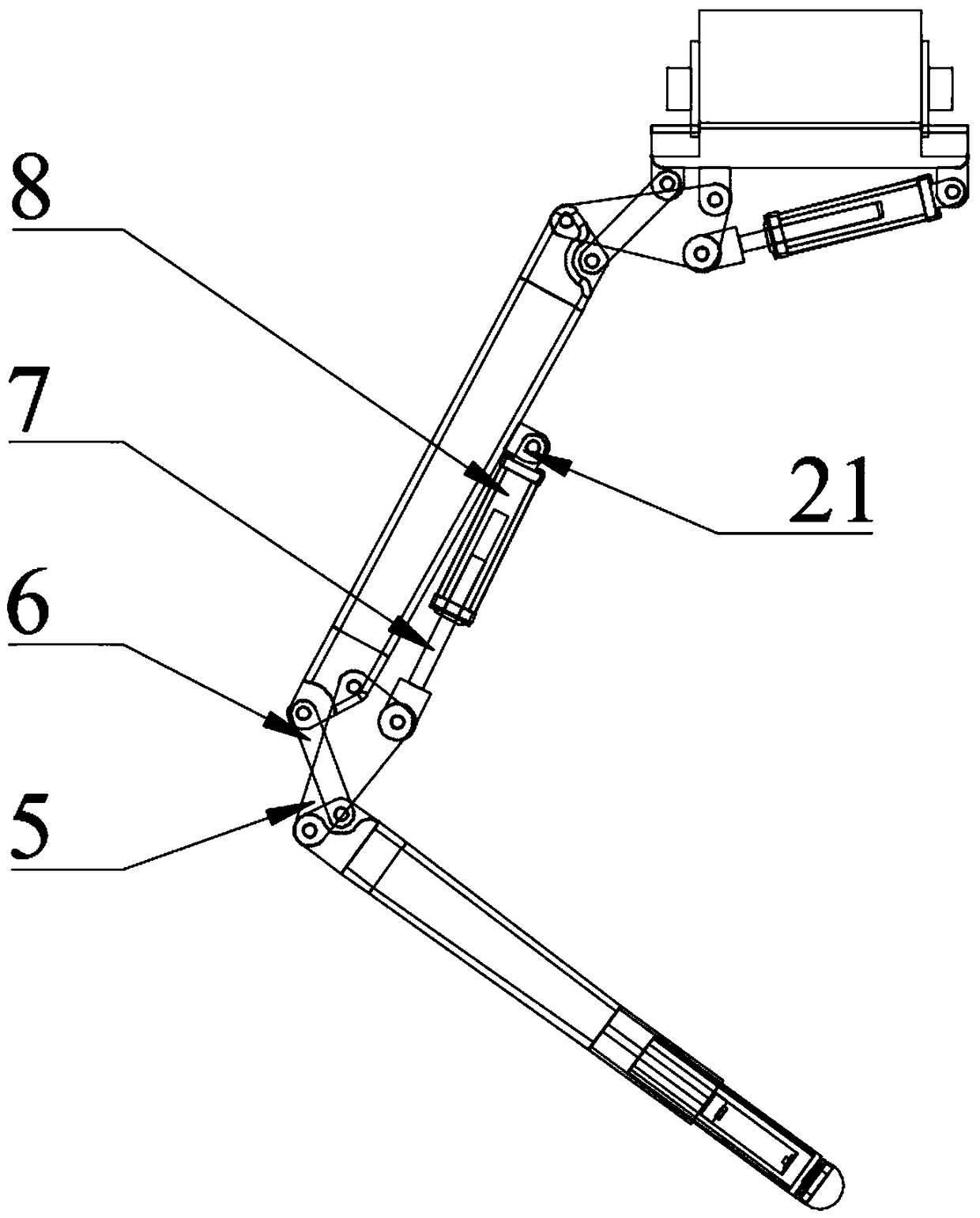
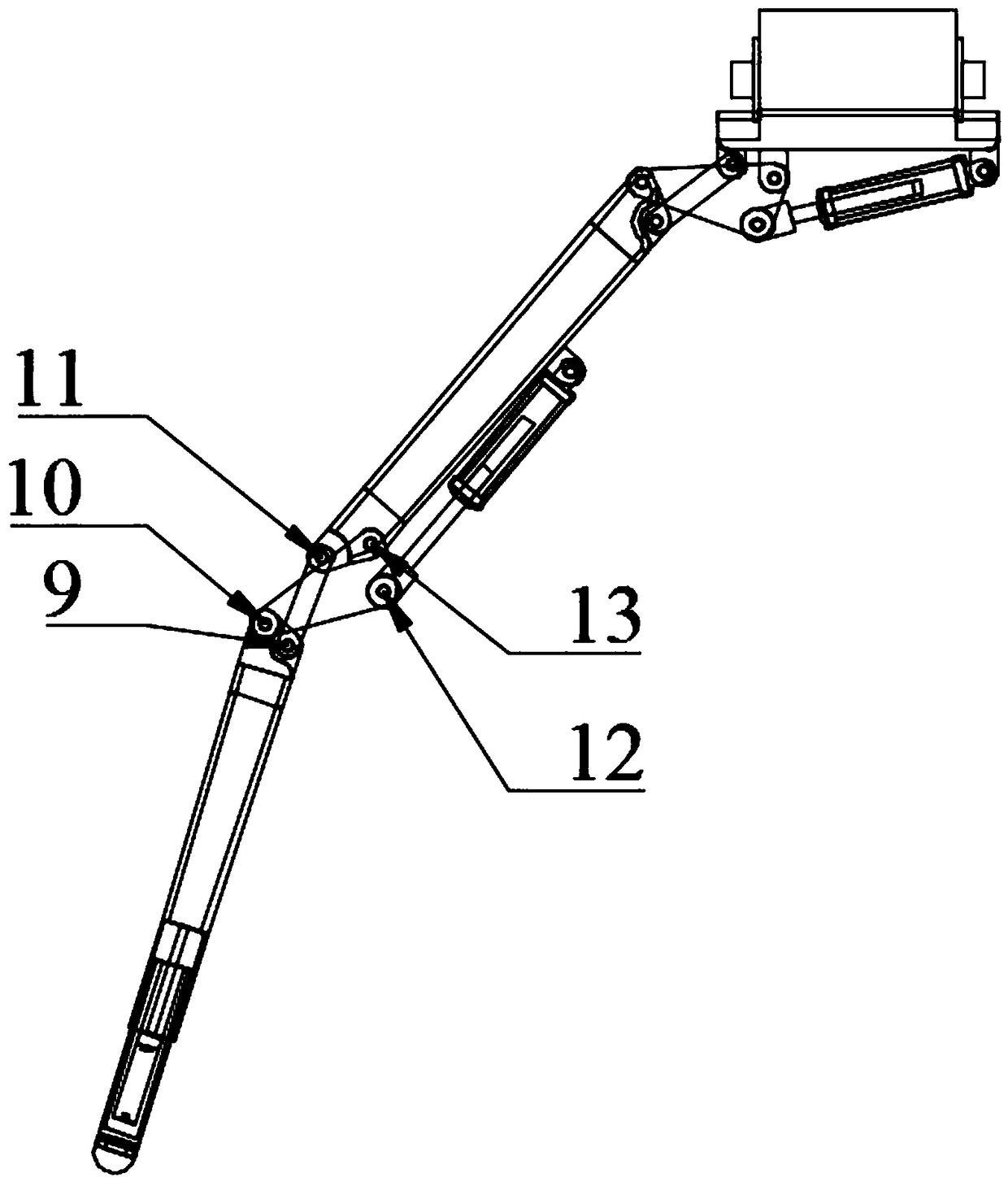
[0025] The leg joint structure includes a thigh 2 and a calf 1, and the thigh 2 and the calf 1 are connected through a large connecting rod 5, a small connecting rod 6 and a hydraulic cylinder 8, and one end of the large connecting rod 5 is connected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More