

Efficient and reliable unmanned aerial vehicle management and control method
A drone, control technology, applied in radio wave measurement system, radio wave reflection/re-radiation, image data processing, etc., can solve the problems of high false alarm rate, accuracy, reliability, poor flexibility, etc., to achieve Reduce false alarm rates, improve identification and tracking, and efficient and reliable disposition methods and processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
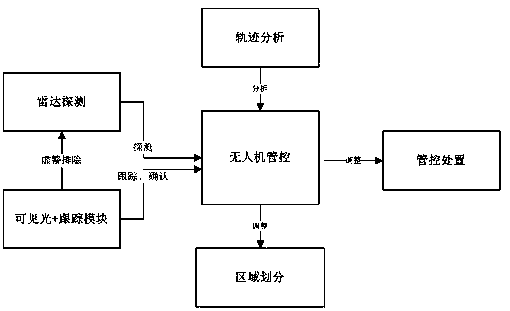
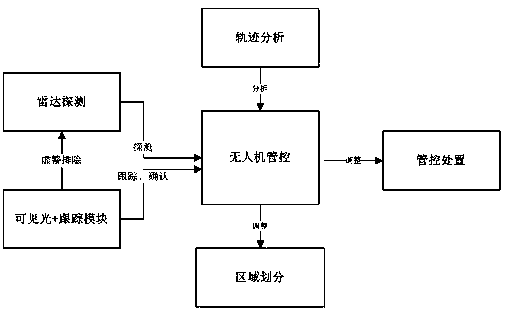
[0038] The present invention is realized through the following technical solutions, as figure 1 As shown, an efficient and reliable UAV control method, the integrated radar detection system scans the radar detection target with multi-target, high resolution, linear pulse frequency modulation, azimuth machine scan and pitch frequency scan, and the output radar detection After multiple analysis of the target, submit the precise detection target; at the same time, use the visible light tracking module to confirm and track the detection target twice, analyze the trajectory positioning of the detection target; adjust the position of the control area of the radar detection system in real time, and conduct all-round control of the detection target .
[0039] It should be noted that, through the above improvements, the present invention proposes an efficient and reliable UAV control method. The integrated radar detection system provides multi-target, high-resolution, chirp system, a...
Embodiment 2
[0043] This embodiment is further optimized on the basis of the above embodiments, such as figure 1 As shown, it specifically includes the following steps:
[0044] Step F1: Use the integrated radar detection system to realize the linear pulse frequency modulation mechanism and the shared mode of the pulse signal transmitting and receiving antenna, scan the radar detection target in the way of multi-target, high resolution, azimuth scanning and pitch frequency scanning, and output The radar detects the target for multiple analysis, and then submits accurate detection target information;
[0045] Step F2: Connect the visible light tracking module to the radar detection system, perform secondary confirmation on the submitted detection target information, and quickly lock and track the detection target;
[0046] Step F3: Adjust the scanning radius of the radar detection system, change the radius of the area controlled by the radar detection system in real time, and achieve the p...
Embodiment 3
[0051] This embodiment is further optimized on the basis of the above embodiments, such as figure 1 As shown, the step F1 specifically includes the following steps:
[0052] Step F11: The radar detection system adopts pulse signal, antenna mechanical scanning or electrical scanning to achieve the purpose of signal frequency modulation form and pulse signal transmitting and receiving antenna sharing mode, and realize the linear pulse frequency modulation mechanism of the radar detection system;
[0053] Step F12: Using the linear pulse modulation mechanism of the radar detection system and the shared mode of the pulse signal transmitting and receiving antenna, providing multi-target, high resolution, azimuth scanning and pitch frequency scanning, and analyzing the output radar detection target;
[0054] The step F12 specifically includes the following steps:
[0055] Step F12-1: Perform three 360° scans and detections of the environment near the radar detection system by means...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More