

Tactile pressure sensor based on electrical impedance tomography and signal acquisition method
A technology of pressure sensor and tomography, which is applied to the measurement, instrument, and force measurement of the property force of the piezoelectric resistance material, which can solve the problems of difficult to meet the pressure measurement of the robot skin, high cost, complicated process, etc., and achieve the measurement Results visualization, low power consumption, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be further described in detail and in-depth below in conjunction with the accompanying drawings.
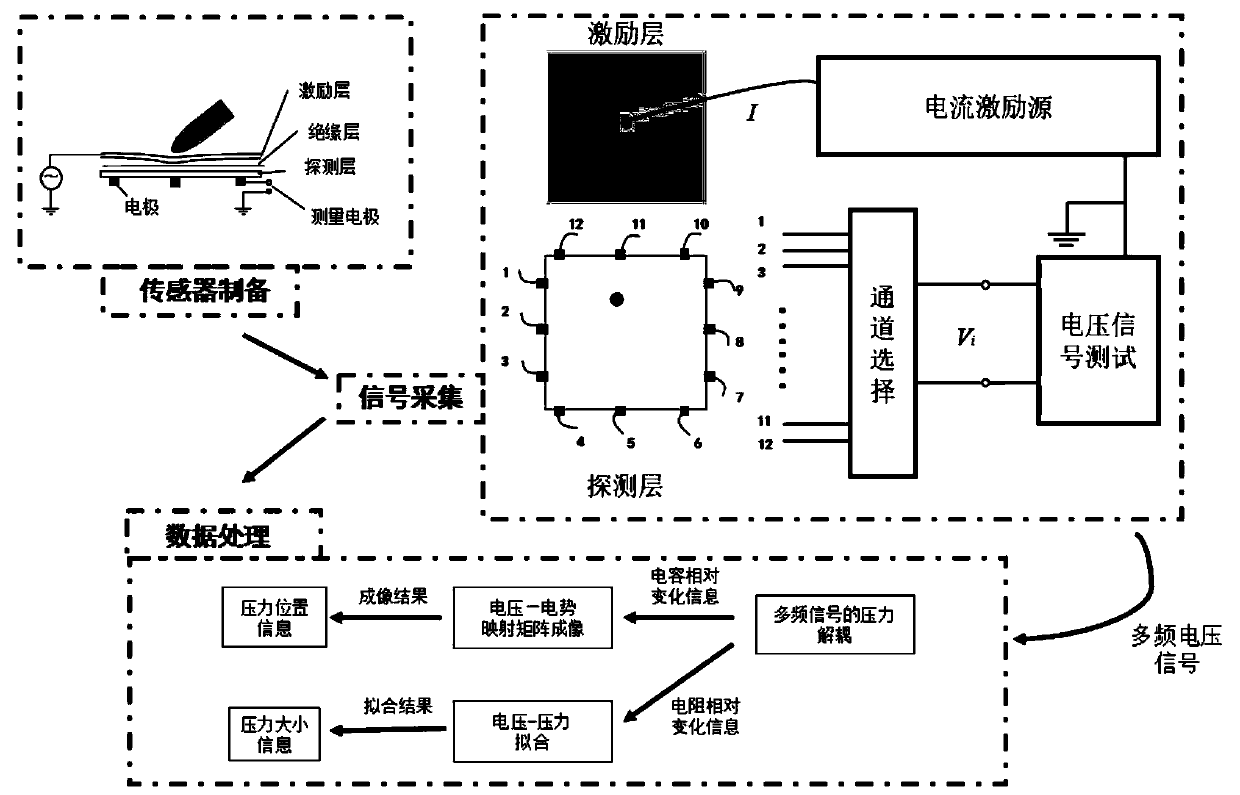
[0035] The present invention adopts electrical impedance imaging technology, and by designing an electromechanical coupling effect based on double-layer conductive fabric and proposing a corresponding tactile imaging method, the structural complexity of the distributed pressure sensor is reduced, and the effect of high efficiency and low power consumption is achieved. The invention has the advantages of simple structure, high reliability, low power consumption, good flexibility and low price.
[0036] like figure 1As shown, the realization of the present invention includes three parts, first is the design of the tactile pressure sensor, second is to use the designed sensor for signal acquisition, and finally is to process the collected mul...
PUM
| Property | Measurement | Unit |
|---|---|---|
| electrical conductivity | aaaaa | aaaaa |
| electrical conductivity | aaaaa | aaaaa |
| electrical conductivity | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More