

Orthopedic joint replacement surgery robot system
A surgical robot and joint replacement technology, applied in the field of medical devices, can solve problems such as inability to calibrate the position of the robotic arm and surgical instruments, position errors of the robotic arm and surgical instruments, and inability to ensure authenticity and standardization, and achieve excellent long-term efficacy, Bone tissue, the effect of saving operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] A preferred embodiment will be given below, and the present invention will be described more clearly and completely in conjunction with the accompanying drawings.
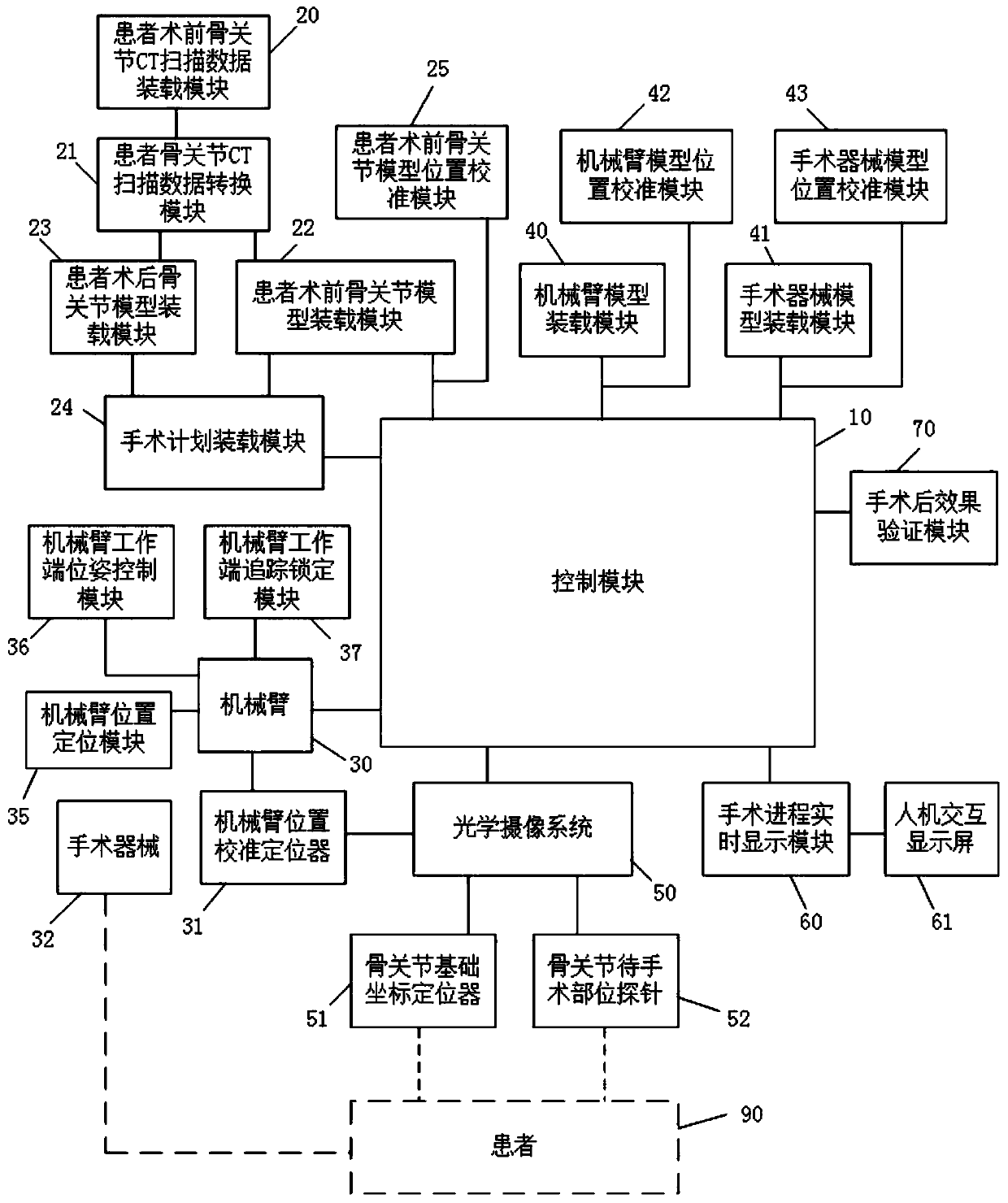
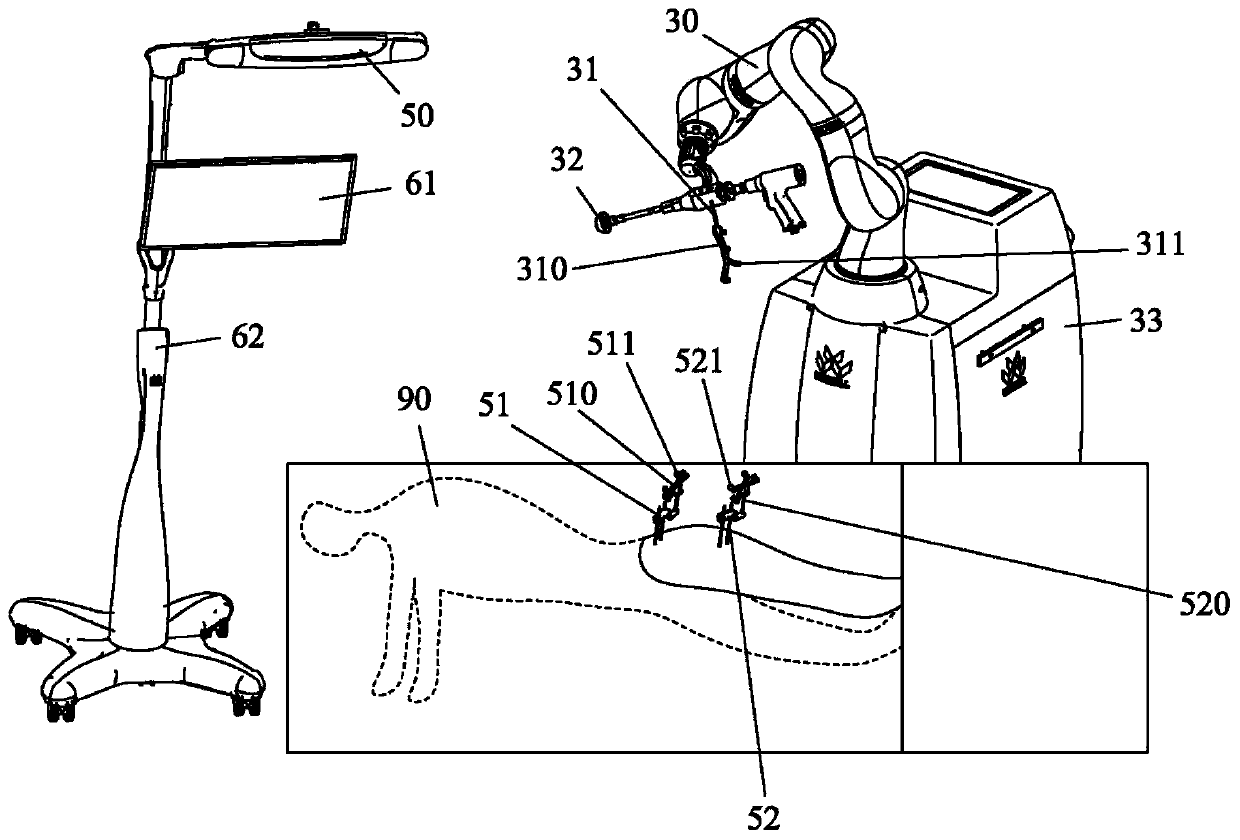
[0020] Such as figure 1 with figure 2 As shown, a robot system for orthopedic joint replacement surgery includes a base 33 on which a mechanical arm 30 for fixing surgical instruments is provided. The mechanical arm is a multi-degree-of-freedom mechanical arm. clamping parts. Preferably, the multi-degree-of-freedom manipulator is a seven-degree-of-freedom manipulator.
[0021] The robot system for orthopedic joint replacement surgery also includes a bracket 62, a bone joint basic coordinate locator 51 and a bone joint site probe 52 to be operated on during the operation; the bracket is provided with a human-computer interaction display 61, which can An optical camera system 50 for the basic coordinate locator of the bone joint and the position information of the probe of the bone joint to be operated.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More