

Acceleration frequency domain segmented servo control method and controller
A servo controller and servo control technology, applied in the direction of mechanical oscillation control, non-electric variable control, control/regulation system, etc., can solve the non-real-time problem belonging to the outer loop of the vibration controller, and reduce the acceleration power spectral density. The effect of reproducing process time, improving control accuracy, and improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
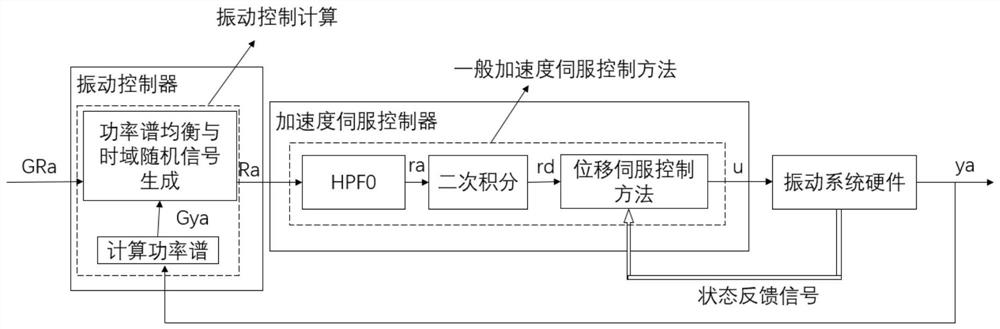
[0037] The accompanying drawings are only used to illustrate the execution process of the acceleration frequency domain segmental servo control method proposed by the present invention, and should not be understood as limitations on this patent.
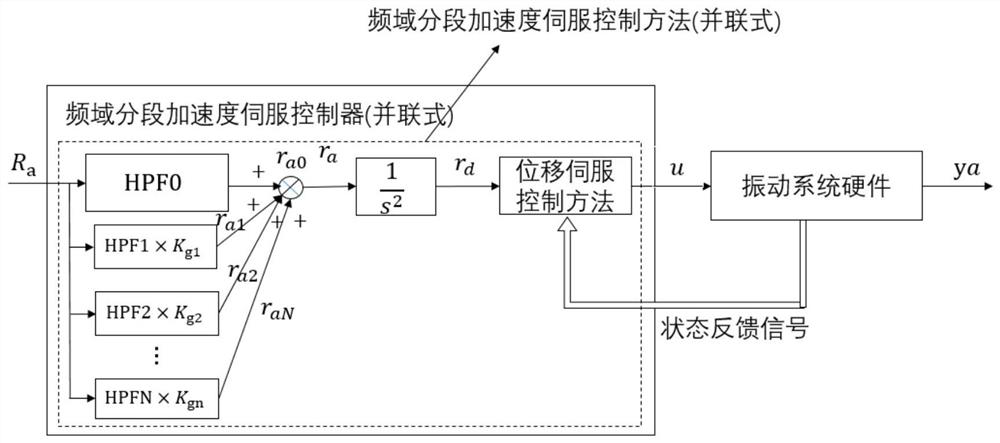
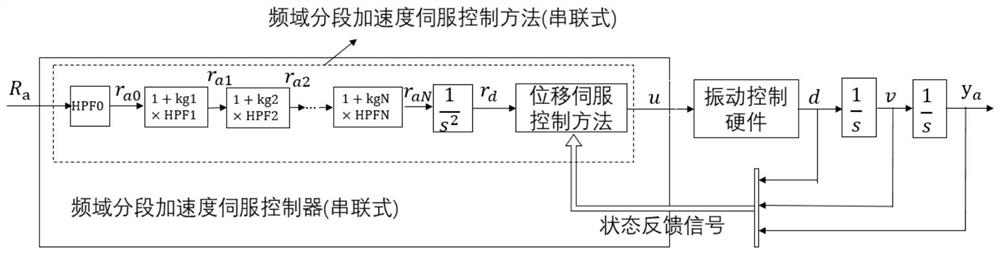
[0038] For the convenience of expression, the acceleration frequency domain segment servo control method using the parallel frequency domain segment processing method will be called the parallel acceleration frequency domain segment servo control method, and the acceleration frequency domain segment using the serial frequency domain segment processing method will be The segmented servo control method is called serial acceleration frequency domain segmented servo control method.
[0039] The parallel acceleration frequency domain segmental servo control method includes the following steps:
[0040] 1) Use the zeroth high-pass filter HPF0 to process the time-domain reference acceleration Ra to obtain the zeroth reference acceleration r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More