

Wheel type permanent magnet adsorption dual-information-channel transformer climbing robot
A permanent magnet adsorption and information channel technology, applied in permanent magnets, motor vehicles, image communication, etc., can solve the problems of manual operation safety hazards that cannot be completely eliminated, uneven surface structure, small step distance of climbing mechanisms, etc., to achieve Improve the efficiency of troubleshooting, reasonable structure, and reduce the effect of its own quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
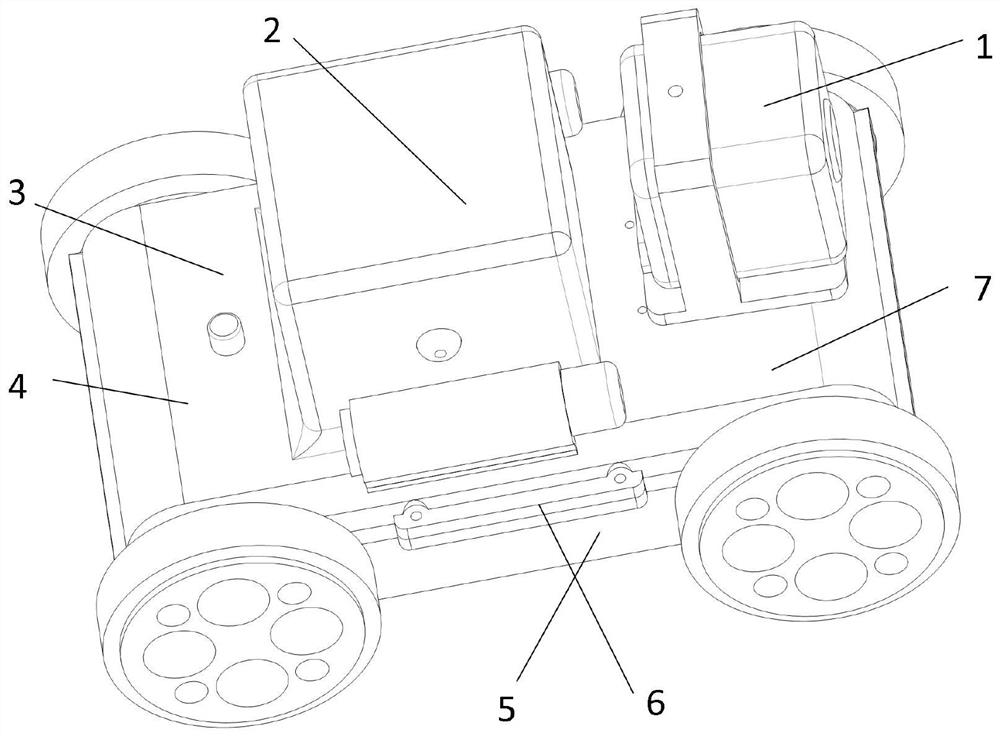
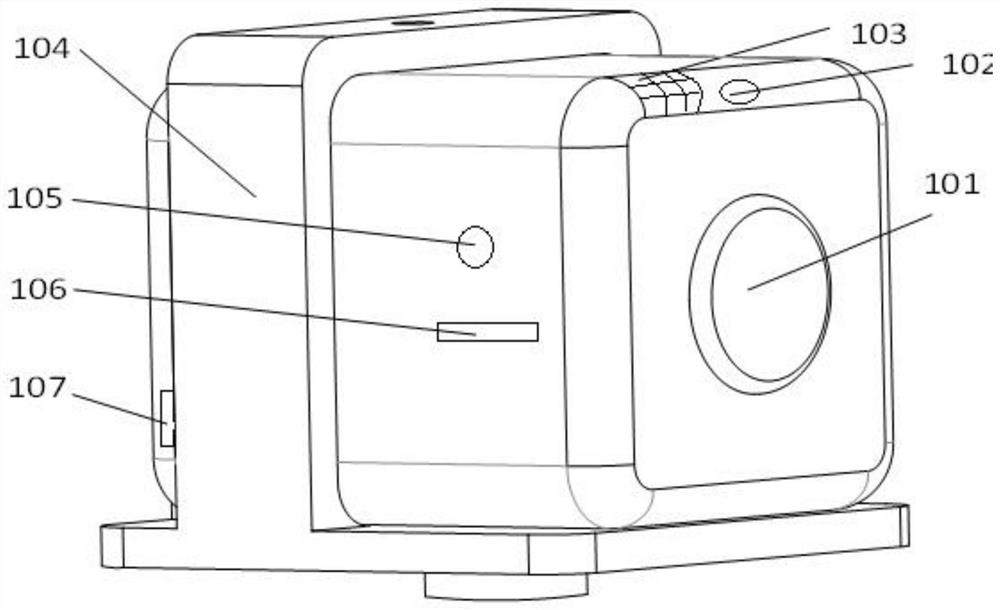
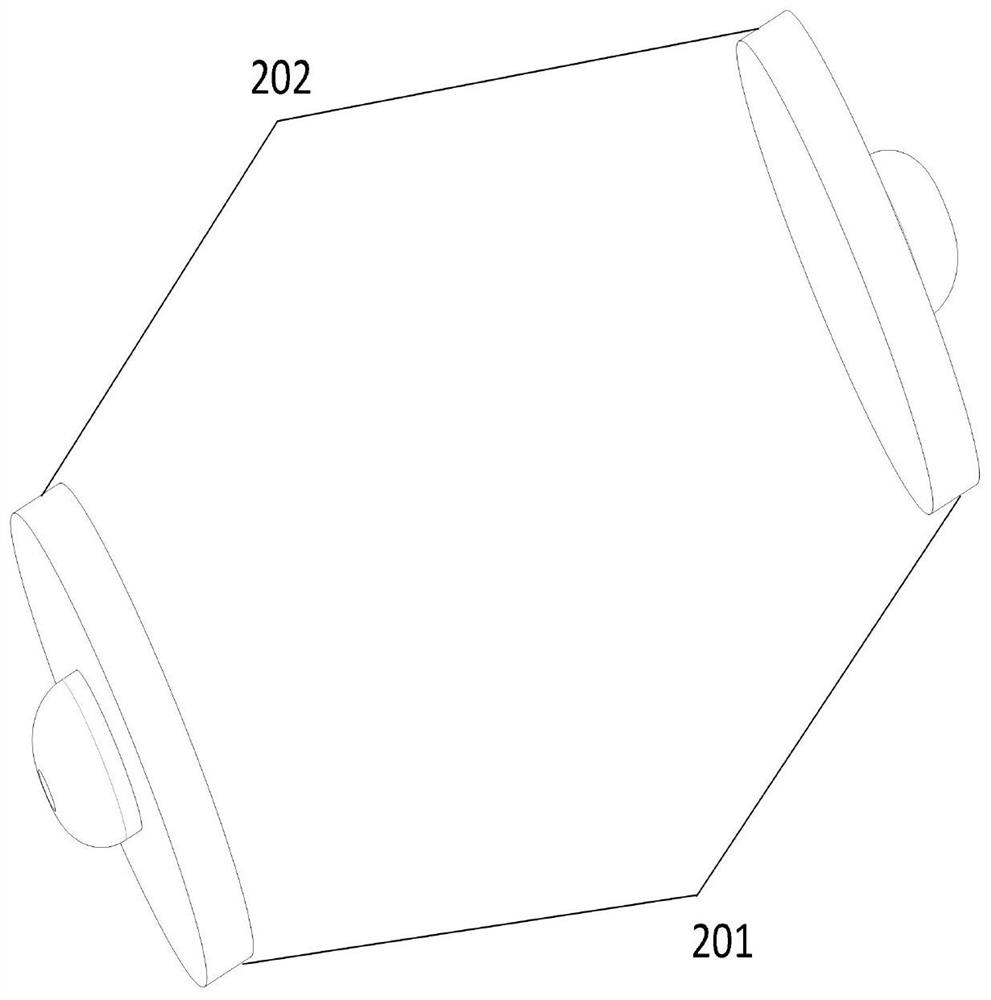
[0045] Embodiment 1: as Figure 1-16 As shown, a wheeled permanent magnetic adsorption dual information channel climbing transformer robot body includes a camera subsystem 1, a lighting subsystem 2, a charging subsystem 3, a motion control board subsystem 4, a housing subsystem 5, and a laser generator System 6, magnetic adsorption drive wheel system 7, external equipment system includes main control box system 8, remote control system 9. The robot body control board subsystem 4 is controlled by the remote control system 9, and then the camera subsystem 1, the lighting lamp subsystem 2, and the laser generator subsystem 6 are controlled by the control board subsystem 4 to capture still images and transmit video information. The board system 4 controls the motion of the magnetic adsorption drive wheel system to manipulate the robot.
[0046] The camera subsystem 1 is used to observe the transformer to find the fault location, communicate with the outside world with electromagn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More