

A high-speed uv motion control method
A motion control and high-speed technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of sensitive changes in environmental parameters, difficult to obtain accurate models, difficult to determine the number of network layers, etc., to achieve the suppression of internal and external The influence of disturbance, the effect of improving work performance and ensuring control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
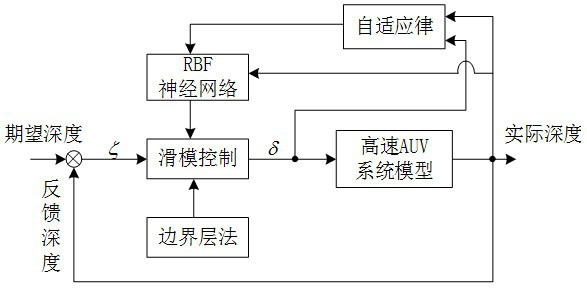
[0029] The present invention is further explained below with reference to the accompanying drawings and examples. The present invention provides a high speed AUV motion control method, and specifically includes the following steps:
[0030] (1) Get the system parameters and the functional relationship of the system parameters and speed by polynomial, and the high-speed AUV simplifies motion model is obtained according to the functional relationship; the speed is simplified by the motor AUV to simplify the input of motion models. Specifically:
[0031] figure 1 The high-speed AUV inertial coordinate system and the carrier coordinate system are simplified for the kinetic model of high speed AUV. Deep control of high-speed AUV at different speeds, and AUV assumes longitudinal velocity when driving in depth A longitudinal speed can be provided by the thrust system and can be kept at a stable value. For constants, ignore the influence of horizontal shaking, , Positive number, For...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More