

Box body taking and placing manipulator for intelligent manufacturing
An intelligent manufacturing and manipulator technology, applied in packaging and other directions, can solve the problems of high stacking height of packaging boxes, easy overall collapse of packaging boxes, and large volume of packaging boxes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
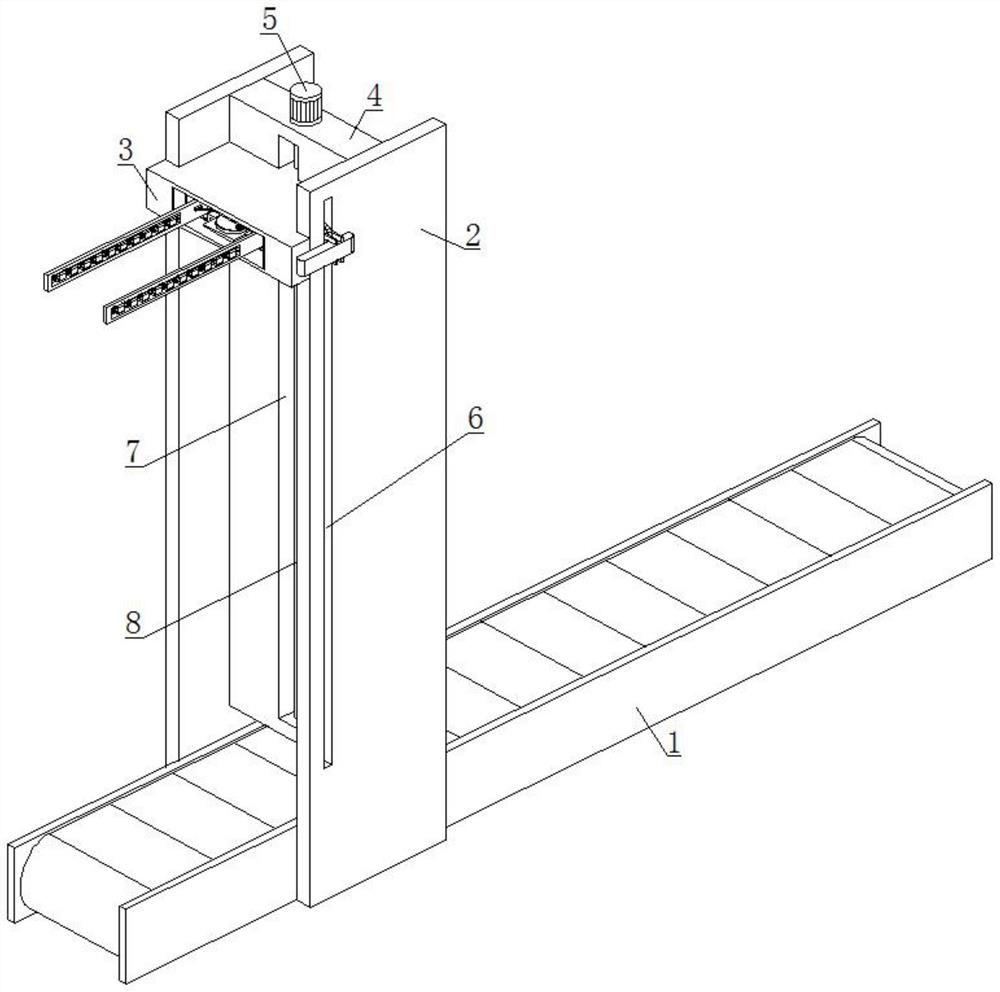
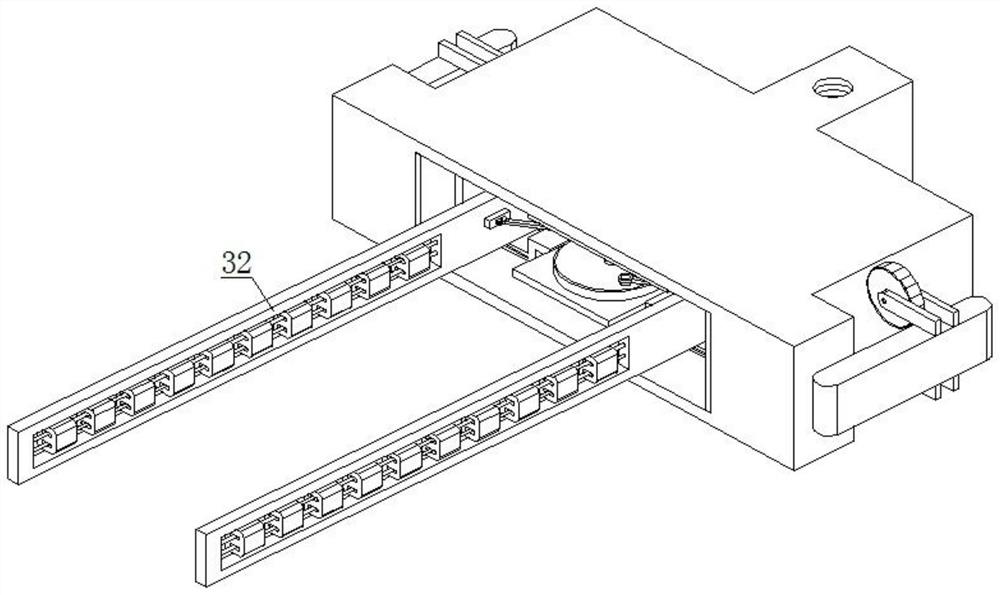
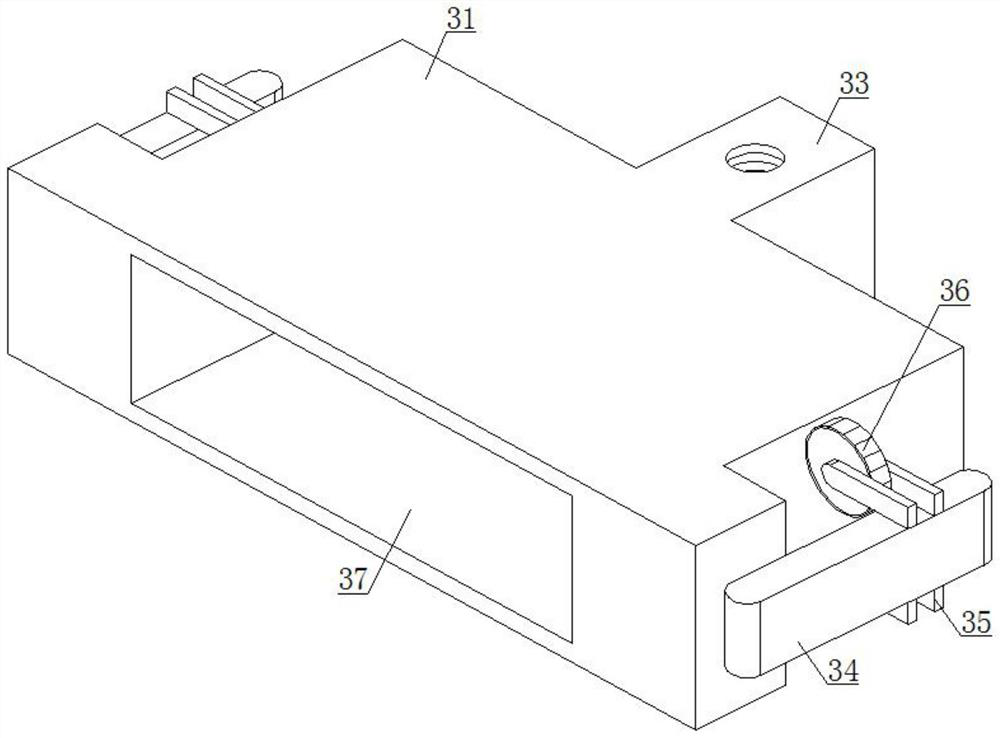
[0036] In order to solve the high stacking height of the packaging boxes formed in large quantities, it is extremely inconvenient to take the packaging boxes later. On the one hand, if the staff extracts from a low place, the technical problem that a large number of packaging boxes are easy to collapse as a whole, such as Figure 1-6 and Figure 12 As shown, the following preferred technical solutions are provided:
[0037] A box pick-and-place manipulator f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More