

Three-dimensional force sensor
A sensor and three-dimensional force technology, applied in the application field of sensor technology, can solve the problems of structural design, calculation principle and complex manufacturing, design principle and processing technology, and difficult robot three-dimensional force detection, etc., to achieve light weight, simple structure, The effect of convenient processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
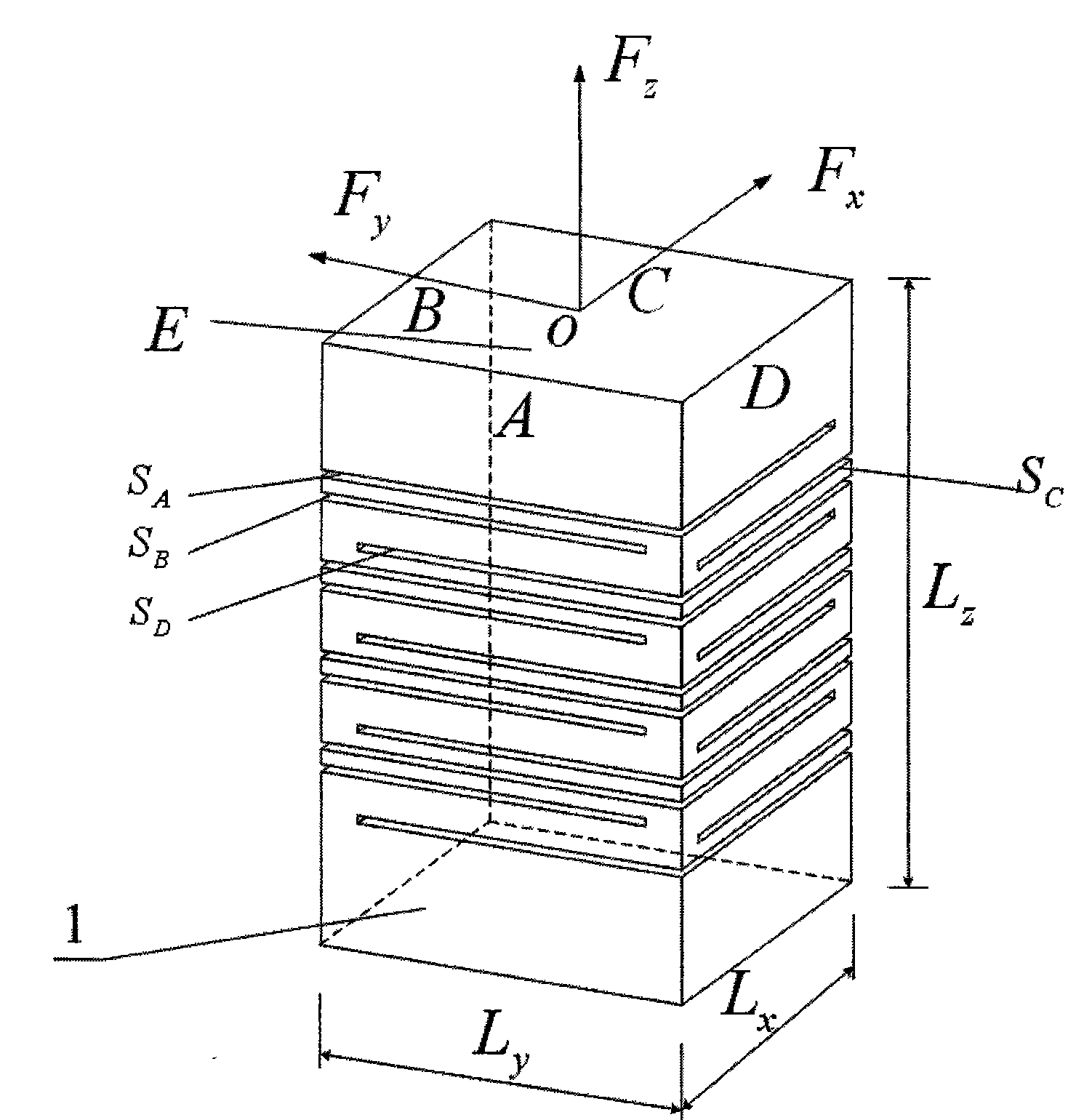
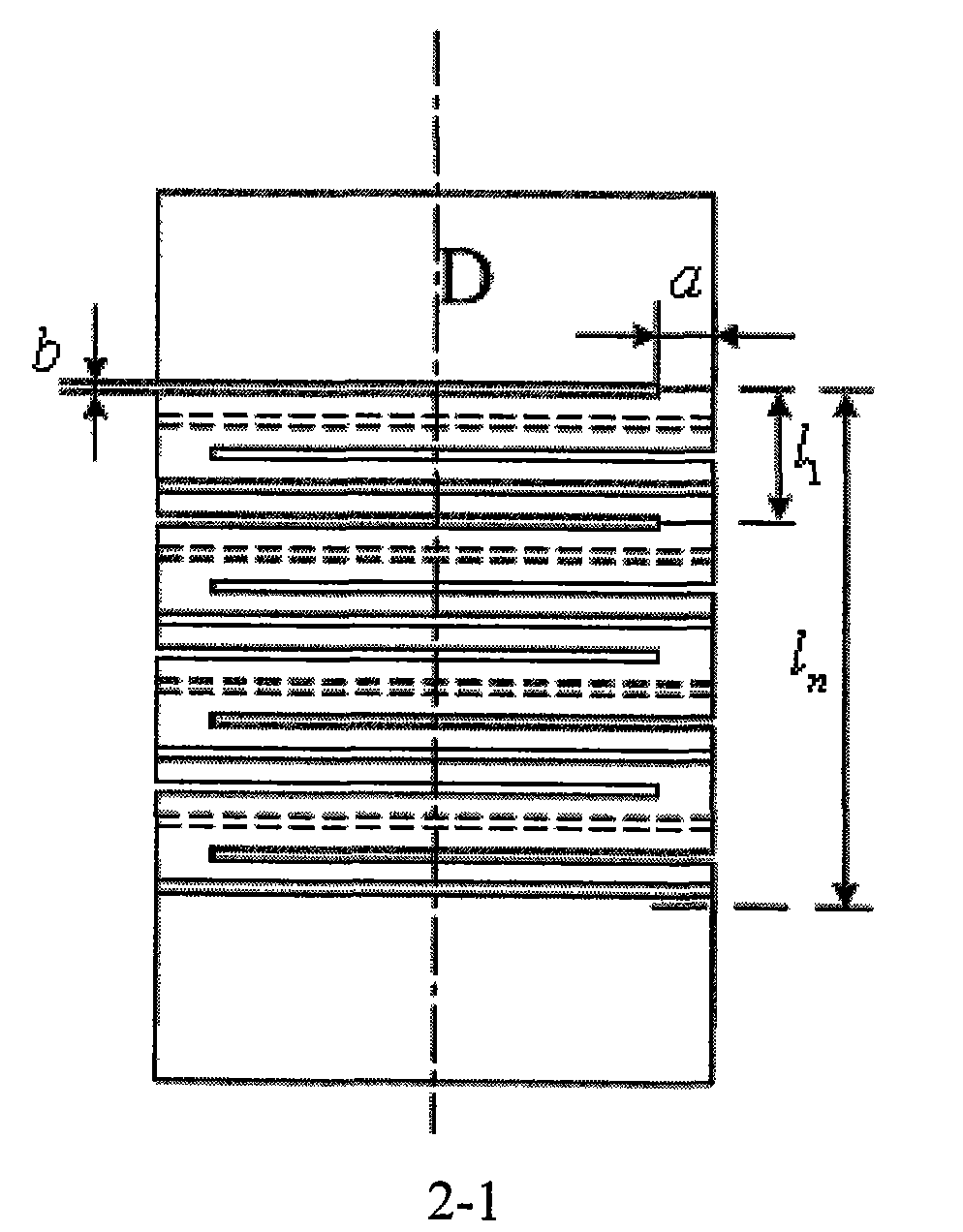
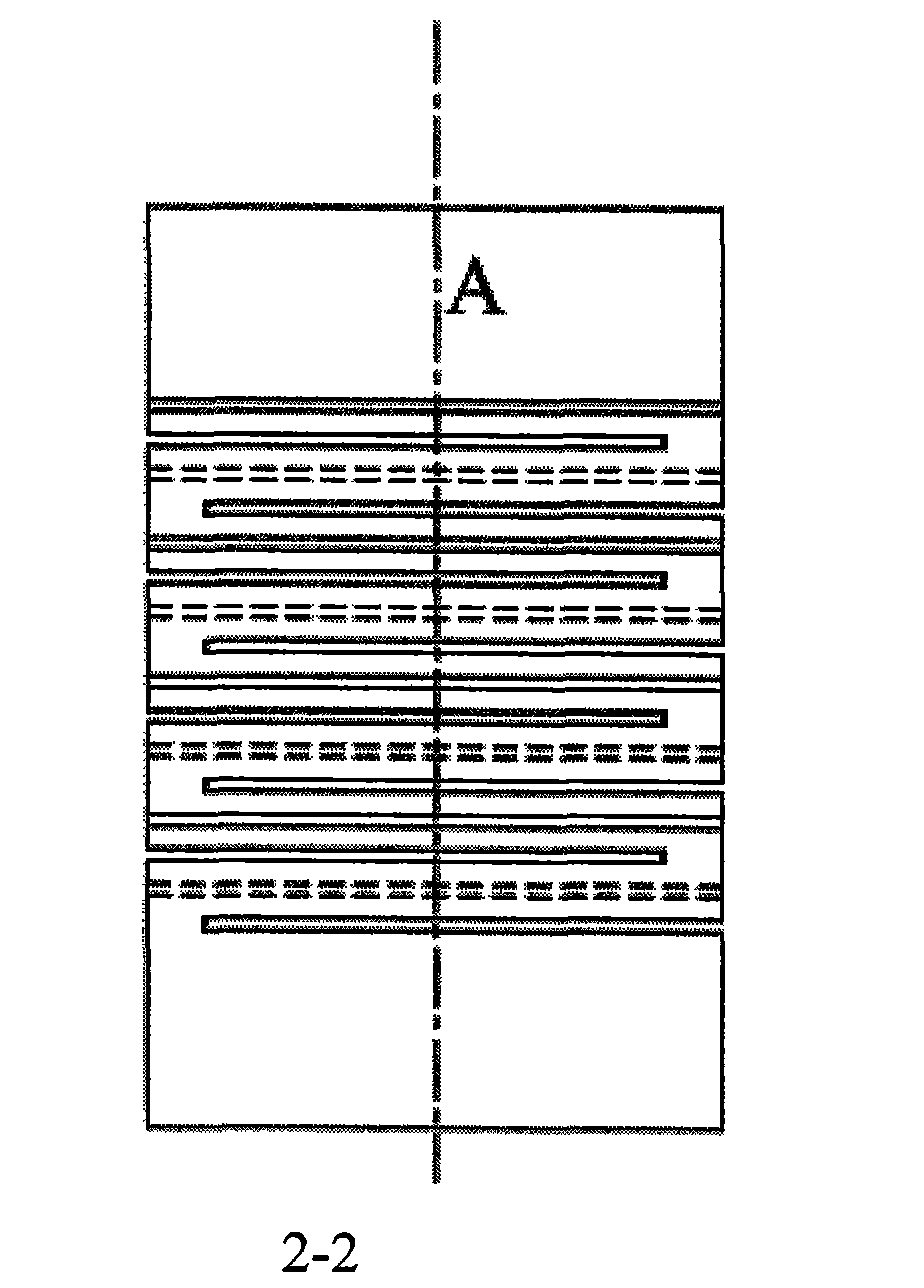
[0018] to combine Figure 1-2 , this embodiment is a cuboid structure 1, and the length of the cuboid structure 1 is L x , the width is L y , the height is L z , with 4 sides A, B, C and D arranged clockwise (or counterclockwise) in the direction of the central axis; the sides A, B, C and D respectively have cutting grooves S parallel to the force-bearing surface E A , S B , S C and S D ; The cutting groove S A , S B , S C and S D Arranged clockwise (or counterclockwise) in the direction of the central axis, and one turn clockwise (or counterclockwise) in the direction of the central axis is a cutting unit, and the distribution length is l 1 , similarly turn n circles clockwise (or counterclockwise) in the direction of the central axis, then the distribution length is l n ; The cutting groove S A , S B , S C and S D The width of b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More