

Robot-assisted system and method for controlling flexible needle to puncture soft tissues in real time
A flexible needle and soft tissue technology, applied in the field of minimally invasive surgical medical devices, can solve the problems of not being able to provide real-time control of the needle body, lack of path planning, and only focusing on alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings.
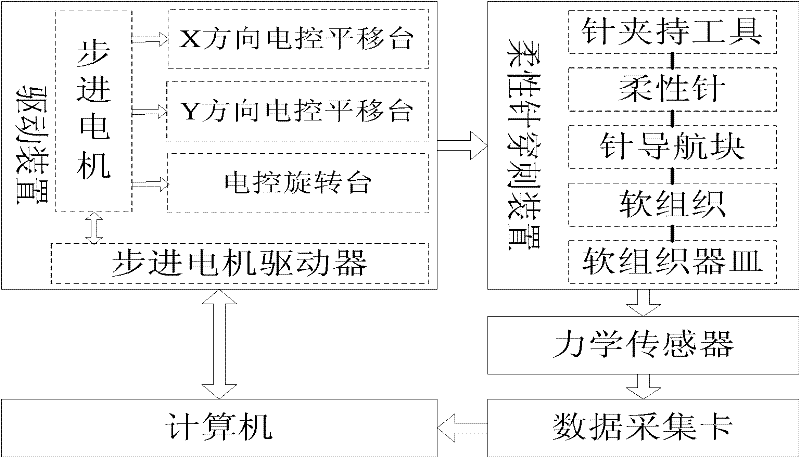
[0049] refer to figure 1 , the robot-assisted flexible needle puncture soft tissue real-time control system provided by the present invention includes: a flexible needle puncture device, a driving device, a mechanical sensor, a data acquisition card and a computer. The flexible needle puncture device includes a flexible needle, a needle navigation block, a needle holding tool, soft tissue and a soft tissue container; the flexible needle is installed on the needle holding tool, and pierces the soft tissue contained in the soft tissue container under the guidance of the needle navigation block, The soft tissues used in the experiment are pork liver and beef, etc.; the mechanical sensor is installed under the soft tissue container for real-time measurement of the force between the flexible needle and the soft tissue; the data acquisition card performs D / A conversion on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More