

GIS (geographic information system)-GPS (global position system) navigation method of inspection robot
A technology of a line patrol robot and a navigation method, which is applied in the field of navigation, can solve problems such as low efficiency and low degree of autonomy, and achieve the effect of high efficiency and high degree of autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
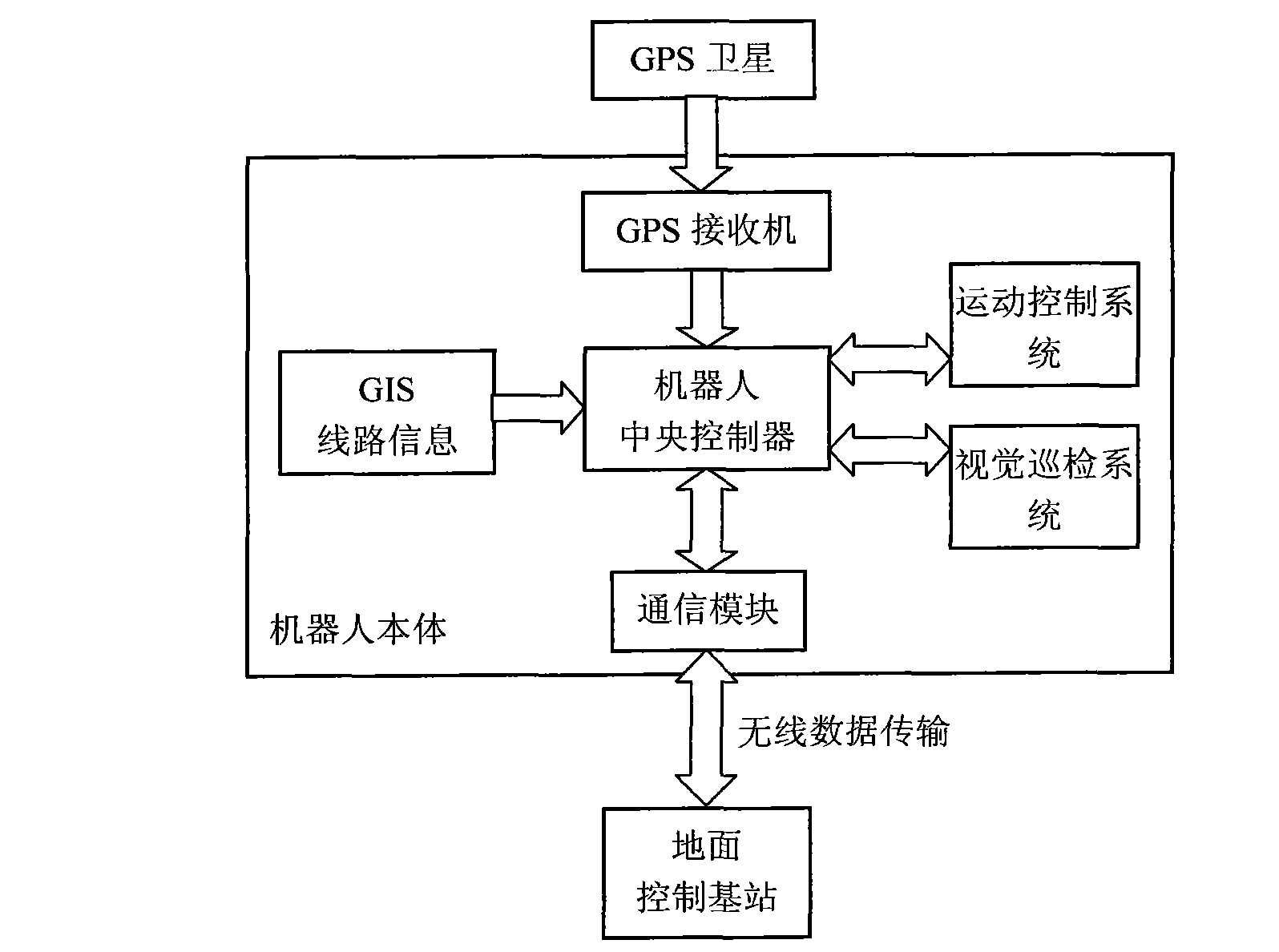
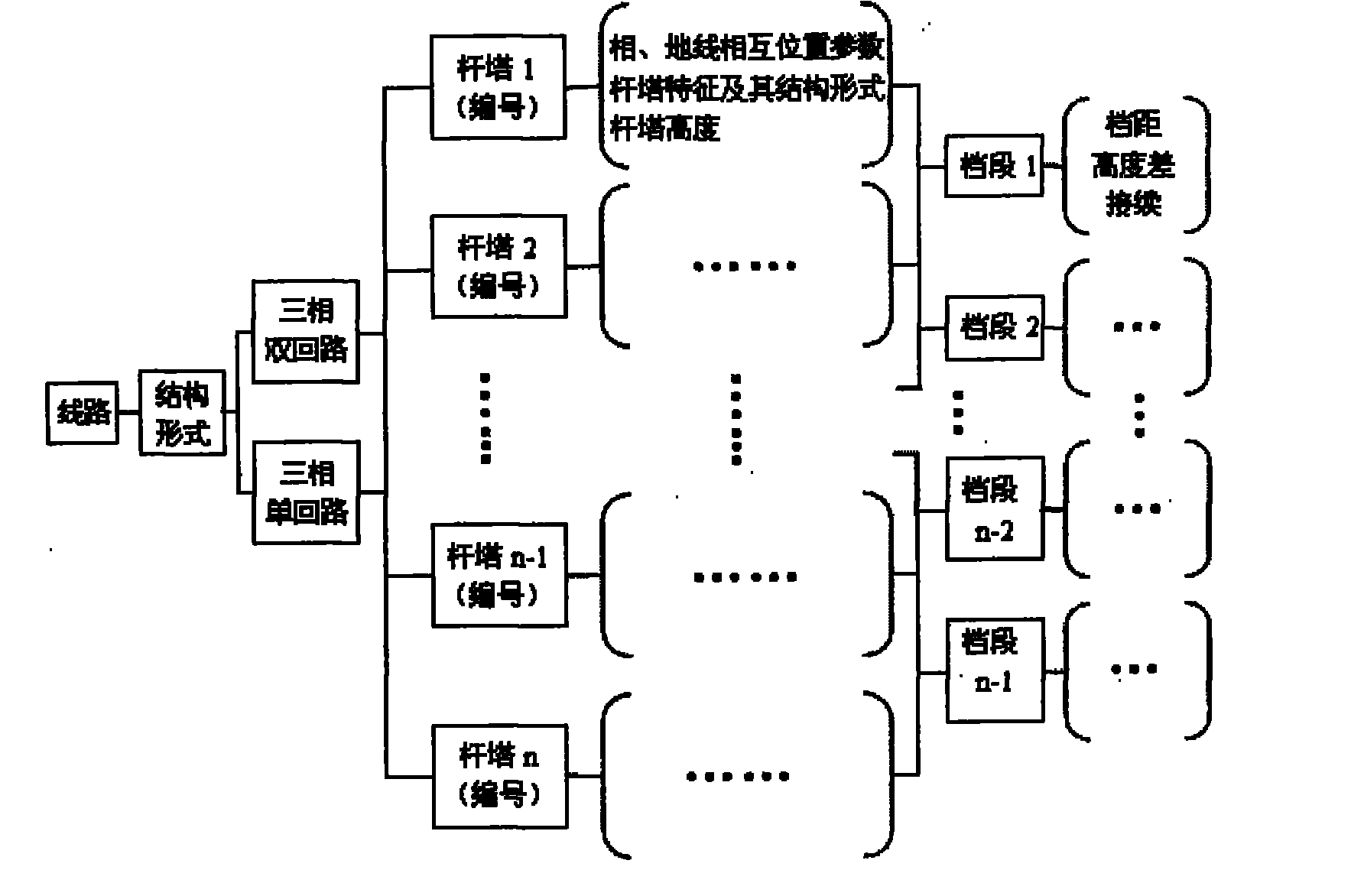
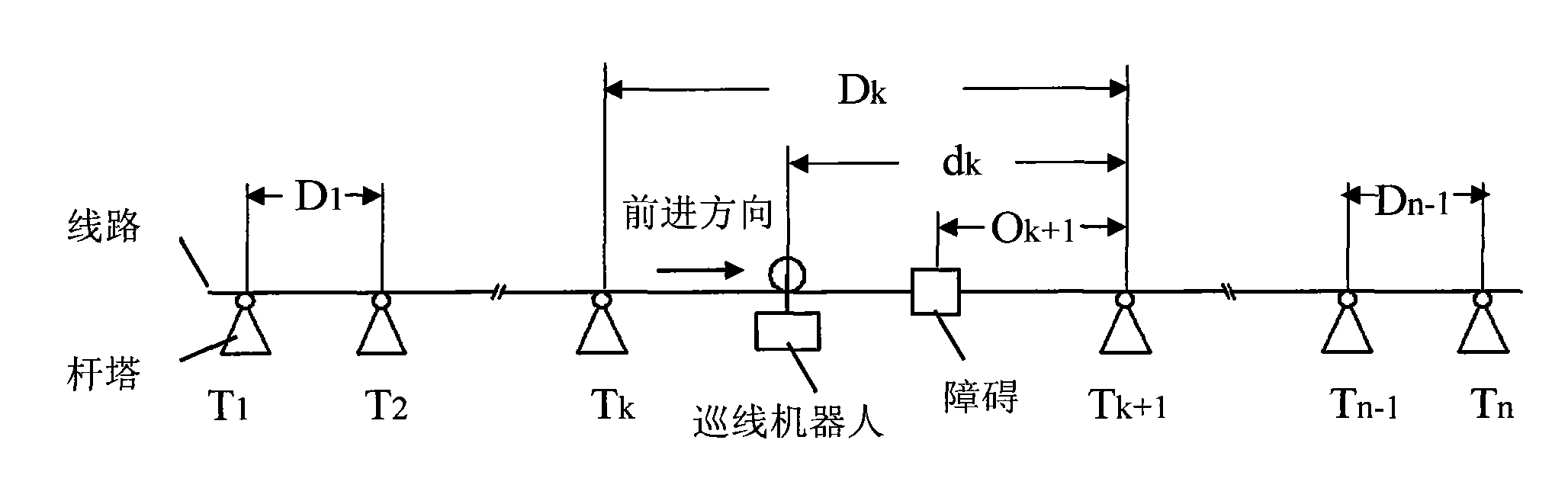
[0033] In order to realize autonomous navigation on the global route, the present invention introduces advanced GPS-GIS technology. Based on the GIS technology, a high-voltage transmission line information system is established, relying on the GPS positioning system to monitor the specific position of the robot in real time, the distance relative to the front and rear towers and obstacles, and determine the line inspection plan of the robot. Autonomous inspection of the line The global structural and environmental information guides the visible light camera and infrared imaging system to conduct inspections.
[0034]The principle of GPS positioning calculation is: when each space satellite is running, there is a coordinate value at any time to represent its position (known value), the position coordinate of the receiver is an unknown value, and the message of the space satellite is being transmitted During the process, the time required can be calculated by comparing the satel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More