

Double-degree-of-freedom robot hip joint steering engine
A degree of freedom, robot technology, applied in the field of robots, can solve the problems of large inertia and poor dynamic response of the body, and achieve the effect of compact joint structure, excellent dynamic performance, and reduced space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
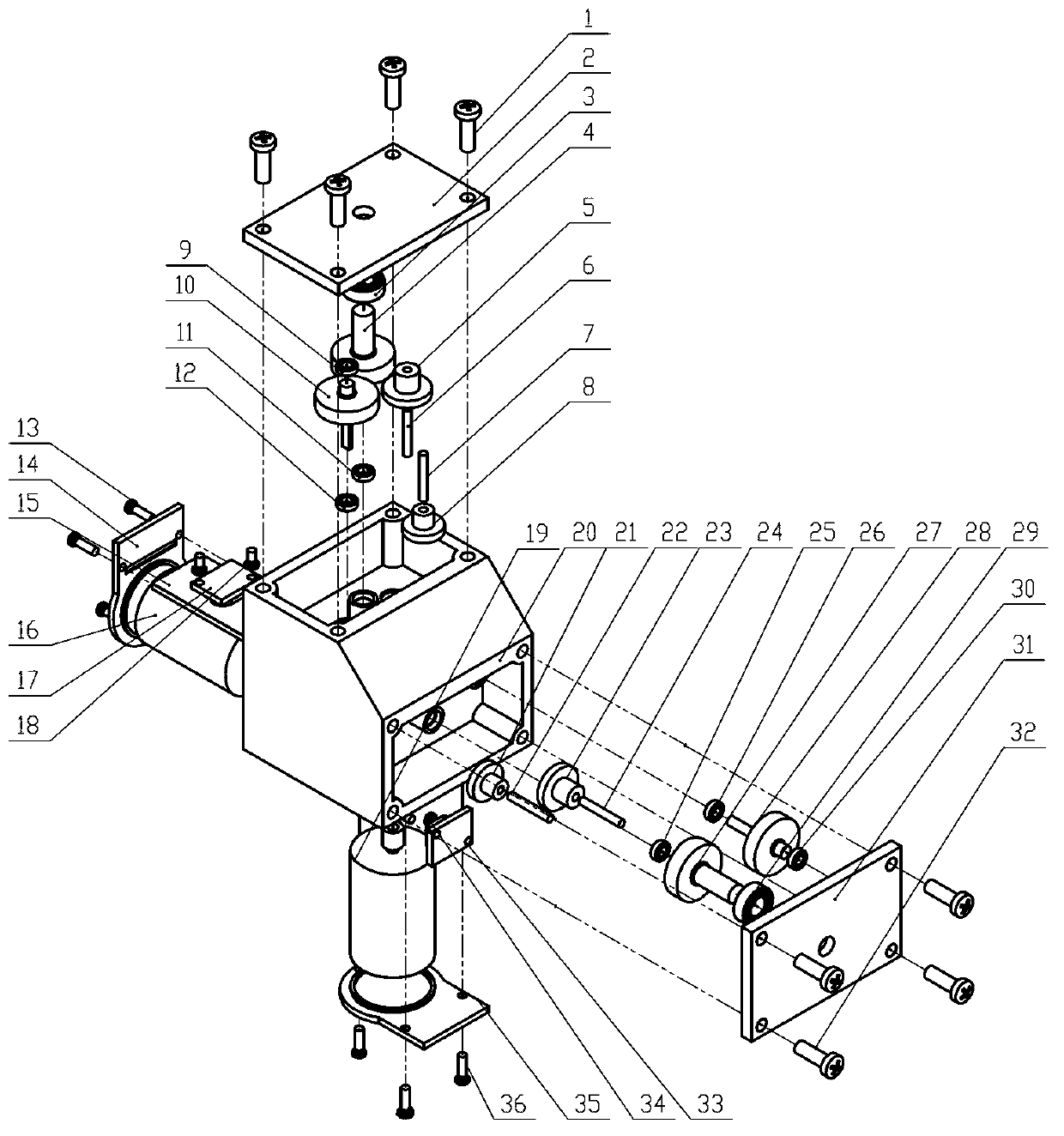
[0022] The present invention will be further described below in conjunction with drawings and embodiments.
[0023] Such as figure 1 and figure 2 As shown, the steering gear consists of X-direction end cover screw 1, X-direction end cover 2, X-direction output shaft upper bearing 3, X-direction output gear 4, X-direction second gear 5, X-direction second spindle 6, X-direction First spindle 7, X first gear 8, X idler upper bearing 9, X idler 10, X output shaft lower bearing 11, X idler lower bearing 12, Y direction motor cover screw 13 , Y direction motor end cover 14, control circuit board 15, Y direction motor 16, X direction angle sensor 17, X direction angle sensor screw 18, X direction motor 19, housing 20, Y direction first gear 21, Y direction first gear A mandrel 22, Y direction second gear 23, Y direction second mandrel 24, Y direction output shaft lower bearing 25, Y direction idler lower bearing 26, Y direction output gear 27, Y direction idler wheel 28, Y direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More