

Texture force measuring method in force tactile representation
A technology of tactile reproduction and measurement method, applied in the direction of measurement force, measurement device, instrument, etc., can solve the problems of deviation of measurement results and original situation, inaccurate measurement, change of connection state and dynamic characteristics, etc., to achieve the effect of increasing realism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
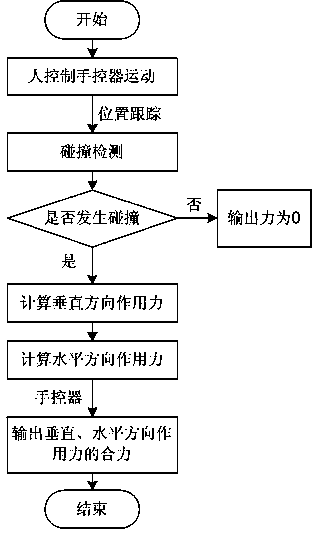
[0032] refer to figure 1 , the method for measuring texture force in the force-tactile reproduction of the present invention: the hand controller of the force-tactile reproduction device controls the virtual probe to approach the virtual texture surface, and performs collision detection in the virtual texture force model, and the virtual probe and the texture surface occur The output force of the force haptic device is 0 before the collision. After the virtual probe collides with the virtual texture surface, the vertical force of the virtual force is calculated respectively. and horizontal force Vertical Finally, force the virtual texture via the hand controller output.
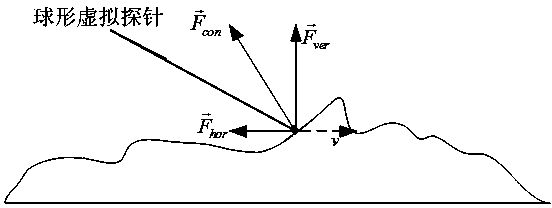
[0033] refer to figure 2 , a schematic diagram of the experiment of the present invention: when the virtual probe touches the textured surface, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More