

Vehicle multi-target coordinating lane changing assisting adaptive cruise control method
A technology of adaptive cruise and control method, which is applied in the direction of control device, vehicle components, and external condition input parameters, etc., and can solve problems such as large differences in system structure and control algorithm, difficulty in ensuring lane change safety, and inability to identify lane change intentions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
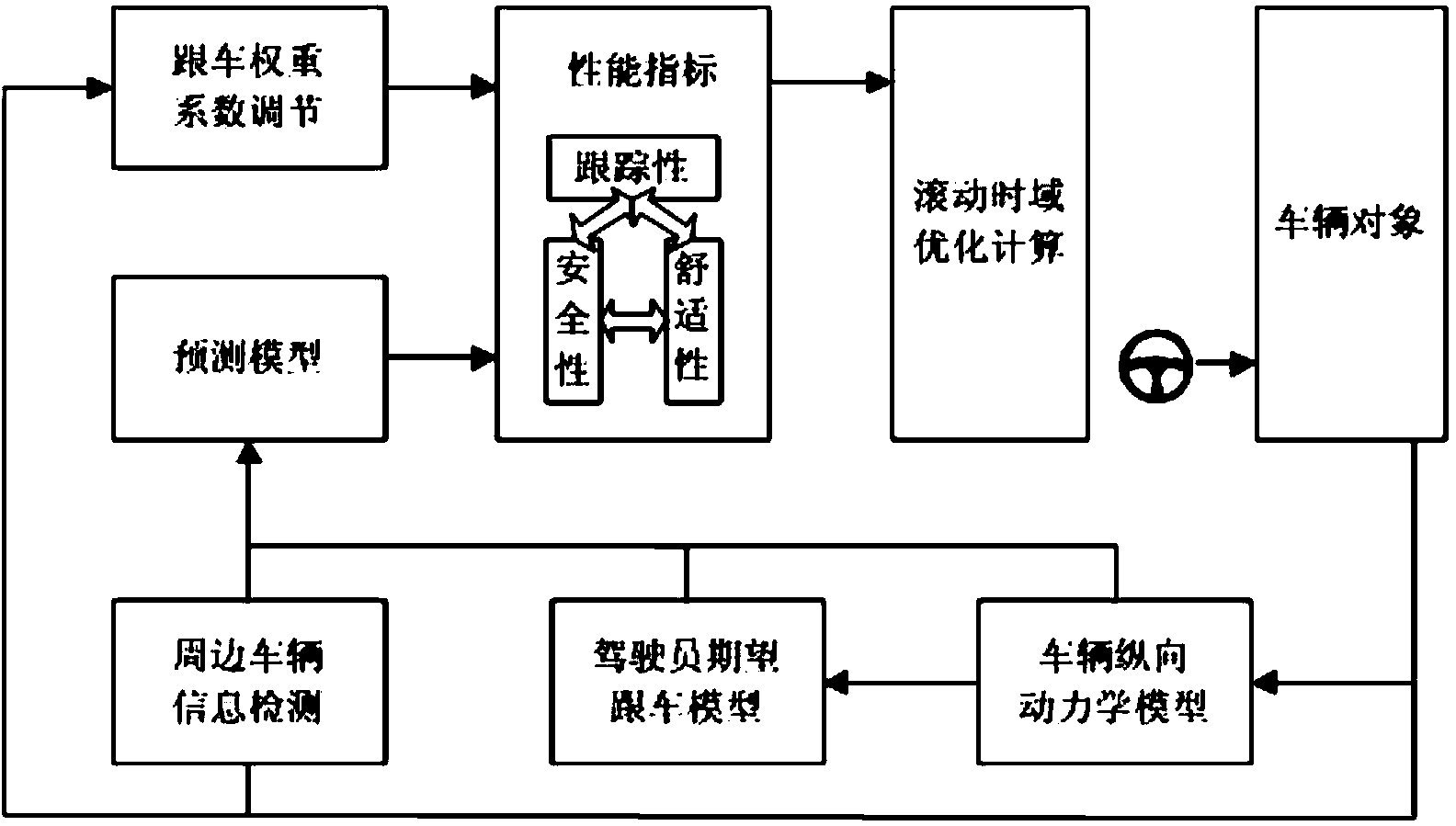
[0053] Based on the theory of Model Predictive Control (MPC, Model Predictive Control), the present invention proposes a vehicle multi-objective coordinated lane change assist adaptive cruise control method (LCACC, Adaptive Cruise Control with Lane Change Assist). The longitudinal dynamic model of the vehicle is the control object. Through the surrounding multi-vehicle information and the driver's expected car-following model, the self-vehicle state, the surrounding multi-vehicle state and the driver's expected car-following state are predicted in the future. Adjust the weight coefficient of following vehicles in the surrounding multi-vehicle state, establish a comprehensive performance index that takes into account tracking, safety and comfort, and use rolling time-domain optimization algorithm to solve the optimal control amount, including the follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More