

A multi-program parallel calculation and navigation method for auv aided by electromagnetic log
A navigation method and the technology of the log, which are applied in the directions of navigation, surveying and navigation, and navigation calculation tools, etc., can solve the problems of GPS signals being susceptible to external interference, lack of concealment, and auxiliary information being susceptible to external interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
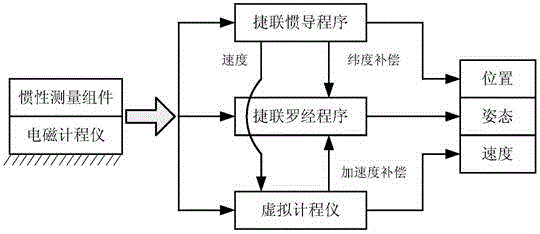
[0057] The present invention comprises the following steps:
[0058] Step 1: Install the inertial measurement component and the electromagnetic log on the AUV, and continuously collect the output data of the gyroscope, accelerometer, and electromagnetic log after fully warming up.
[0059] Step 2: Use the collected gyroscope and accelerometer data to run the strapdown inertial navigation program, and output the calculated speed and position of the AUV.
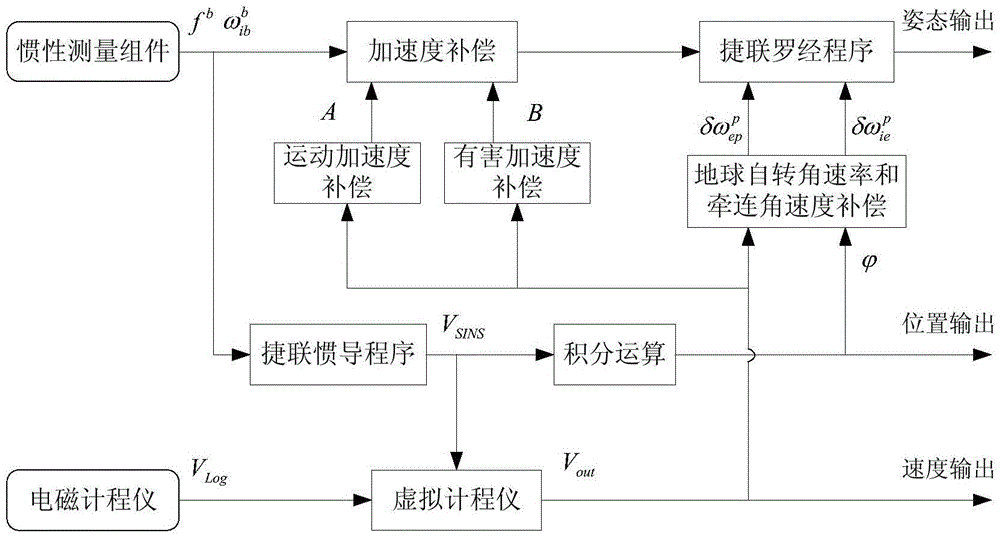
[0060] Step 3: After the speed calculated by the strapdown inertial navigation program and the speed measured by the electromagnetic log are processed by the virtual log, the optimized speed information is output.
[0061] The function of the virtual log is to comprehensively process the speed measured by the electromagnetic log and the speed calculated by the strapdown inertial navigation program to obtain the optimized AUV water speed.
[0062] V Log =V AUV -V current +δV Log
[0063] V SINS =V AUV +δV SINS
[0064...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More