

Four-leg walking robot with single power leg mechanism
A walking robot, a single-power technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inability to adjust the height and step distance of the legs, limit the passing performance and scope of application of the mechanism, and achieve the reduction of the number of drive motors and the improvement of the ground Passability and application range, and the effect of simplifying the control algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing.
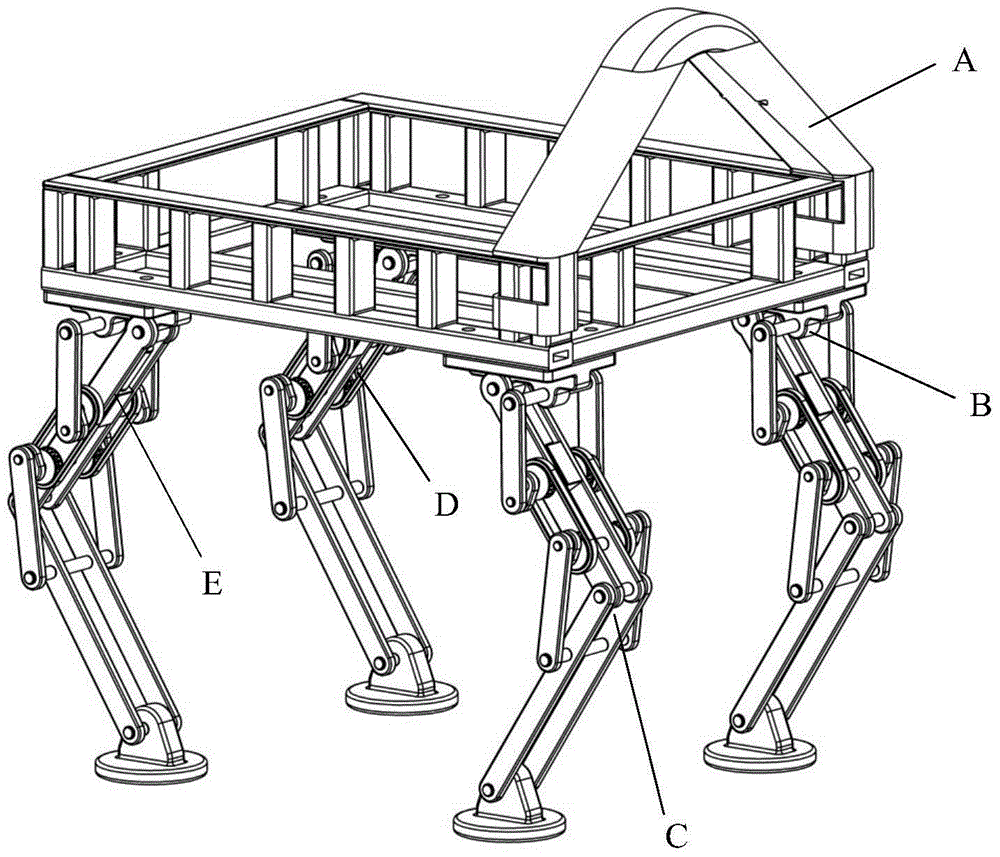
[0022] Such as figure 1 As shown, the quadruped walking robot with single power leg mechanism includes carrier A, b to e group leg mechanisms.
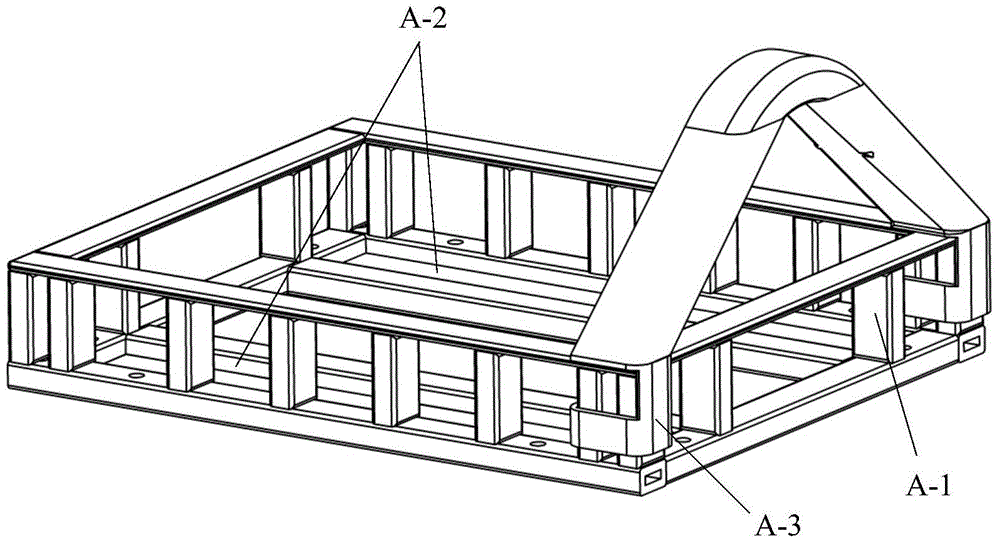
[0023] Such as figure 2 As shown, the carrying frame A includes: guardrail frame A-1, frame steel plate A-2 and traction front bar A-3, and the connection method is as follows: two frame steel plates A-2 are respectively welded on both sides of the guardrail frame A-1 At the bottom, the traction front bar A-3 fits with the guardrail through the end collar, and is fixed with the guardrail frame A-1.
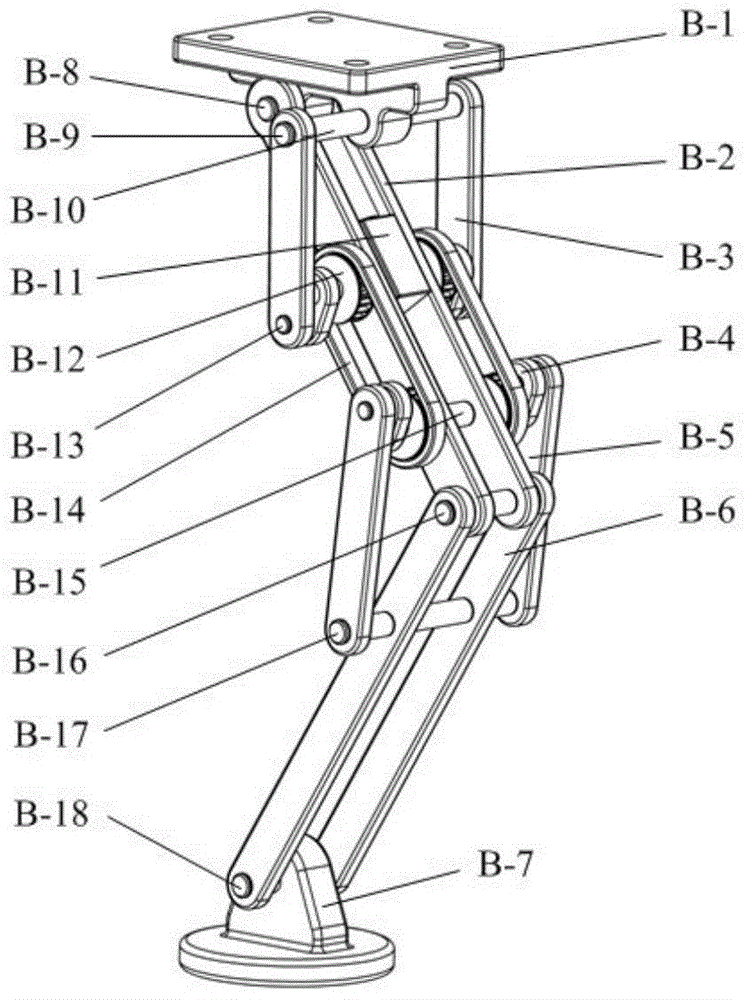
[0024] Groups b and c of leg mechanisms B and C and groups d and e of leg mechanisms D and E are the front and rear legs of the quadruped robot, respectively, with single-power leg mechanisms, and the joints face opposite directions. The connection relationship between the groups b to e of the leg mechanisms and the carrier frame A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More