

Multiple sporting state spherical robot
A spherical robot, dynamic technology, applied in the field of mobile robots, can solve the problems of poor climbing and obstacle crossing performance, poor obstacle crossing ability, large robot volume, etc., to achieve good stability and flexibility, good anti-hitting ability, protection The effect of the core part
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
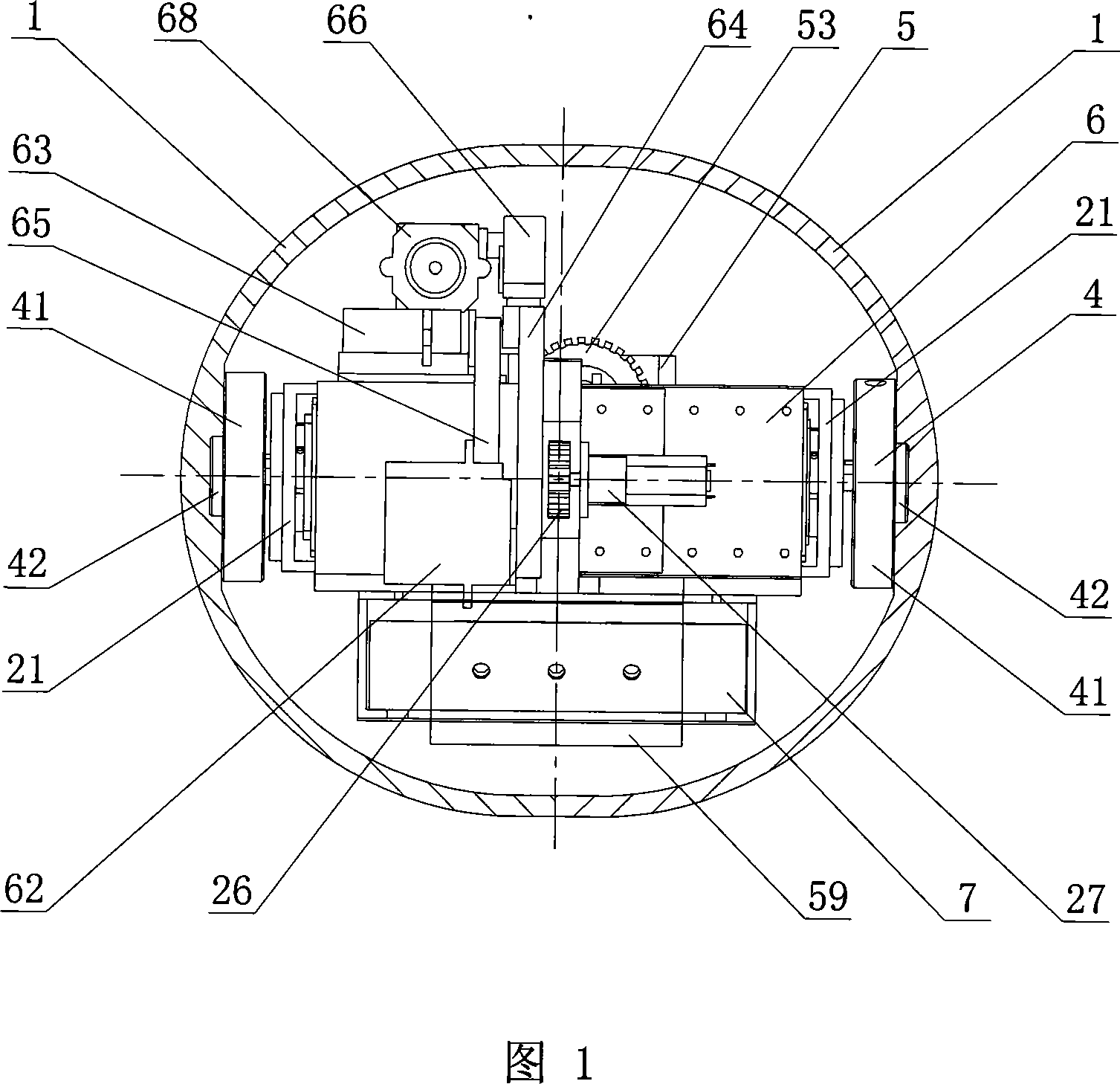
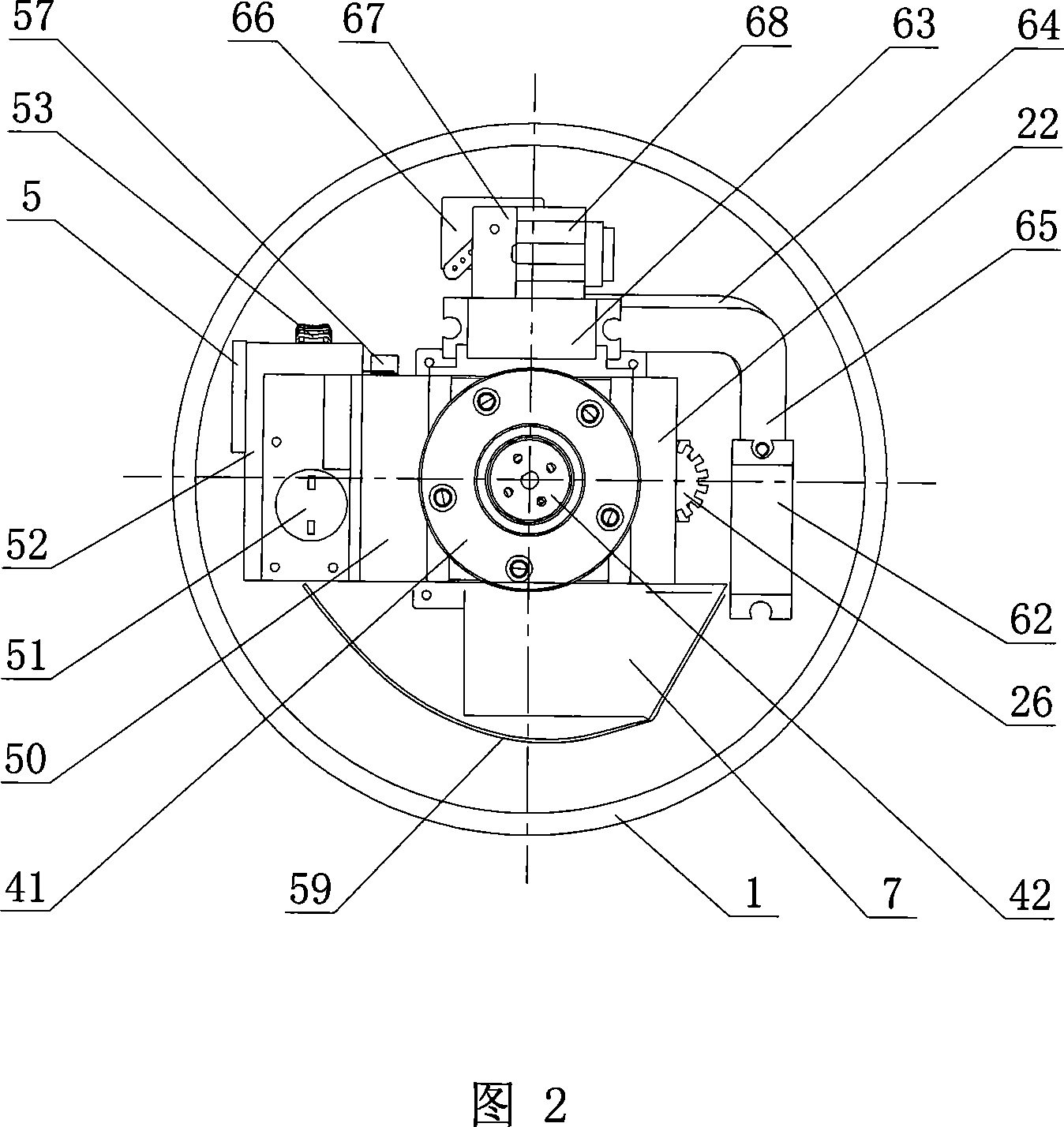
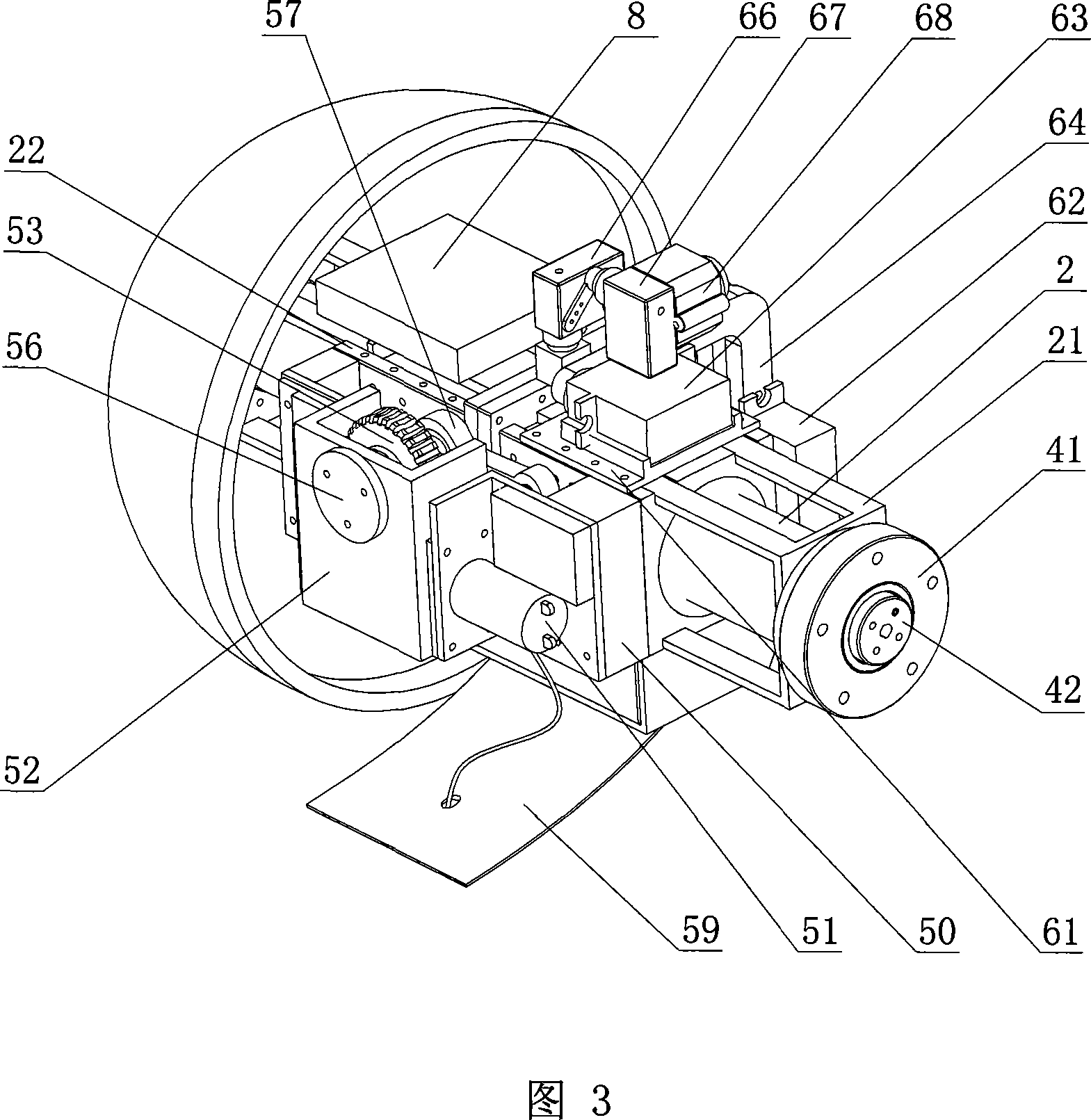
[0054] As shown in Figures 1 to 3, the multi-kinetic spherical robot of the present invention includes two hemispherical shells 1 and a spiral telescopic mechanism 2 that drives the two hemispherical shells 1 to expand or close, driven by the spiral telescopic mechanism 2 , the two hemispherical shells 1 can be closed or unfolded, so that the robot is in two motion states of spherical state and two-wheel state respectively.
[0055] As shown in Fig. 4 and Fig. 5, the spiral telescopic mechanism 2 of the multi-kinetic spherical robot of the present invention includes a fixed bracket 22, a drive assembly and two groups of telescopic assemblies, the drive assembly is installed in the middle of the fixed bracket 22, and the two groups of telescopic assemblies are respectively Installed on both ends of the fixed bracket 22. The fixed bracket 22 is provided with a sliding slot 222 , and the middle part of the fixed bracket 22 is provided with a gear receiving portion 221 . The driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More