

Main operation hand for minimally invasive neurosurgery robot on basis of wire rope gearing
A wire rope and robot technology, applied in the field of the main operator of the minimally invasive surgical robot, can solve the problems such as the inability to sense the contact of the end of the surgical tool, the inability of the main operator to provide feedback force, and the inability to reduce the flexibility of the inertia of the rod. Small mass, compact mechanism, the effect of reducing the volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
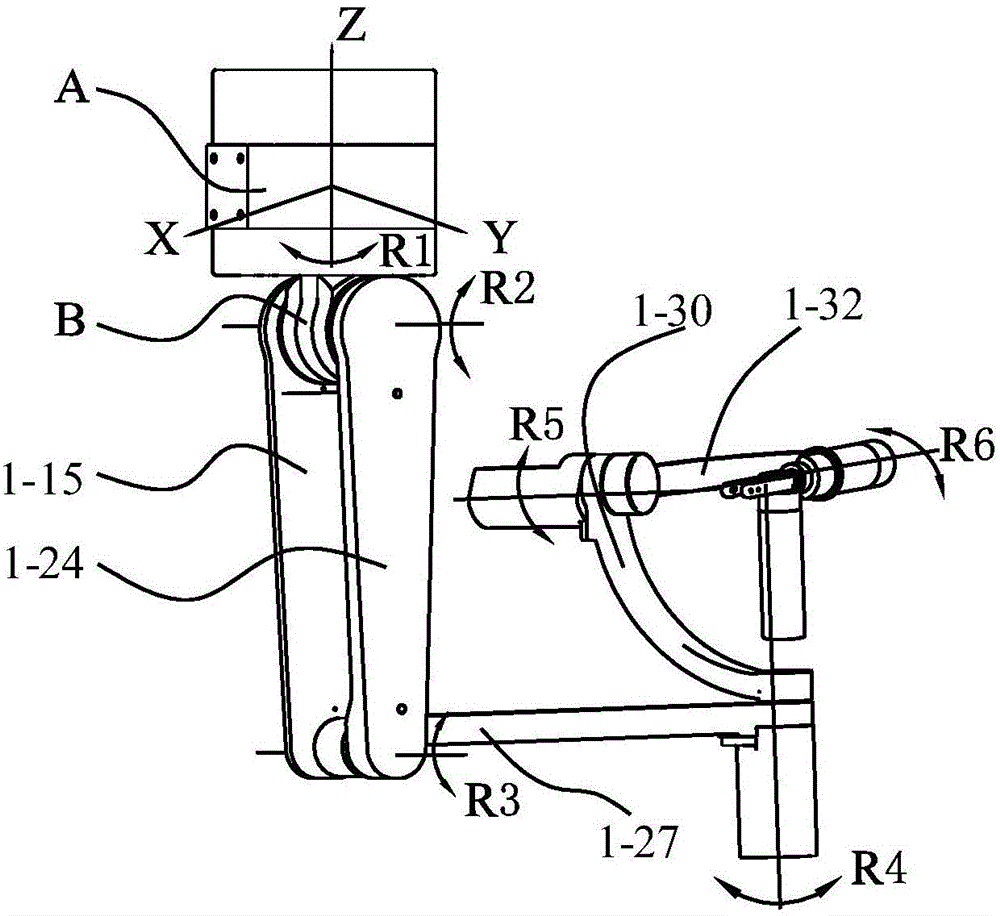
[0027] A main operating hand for a minimally invasive surgical robot based on wire rope transmission of the present invention, which includes a base A, a first joint transmission mechanism, a second joint transmission mechanism, a third joint transmission mechanism, a wrist transmission mechanism and an opening and closing mechanism ,
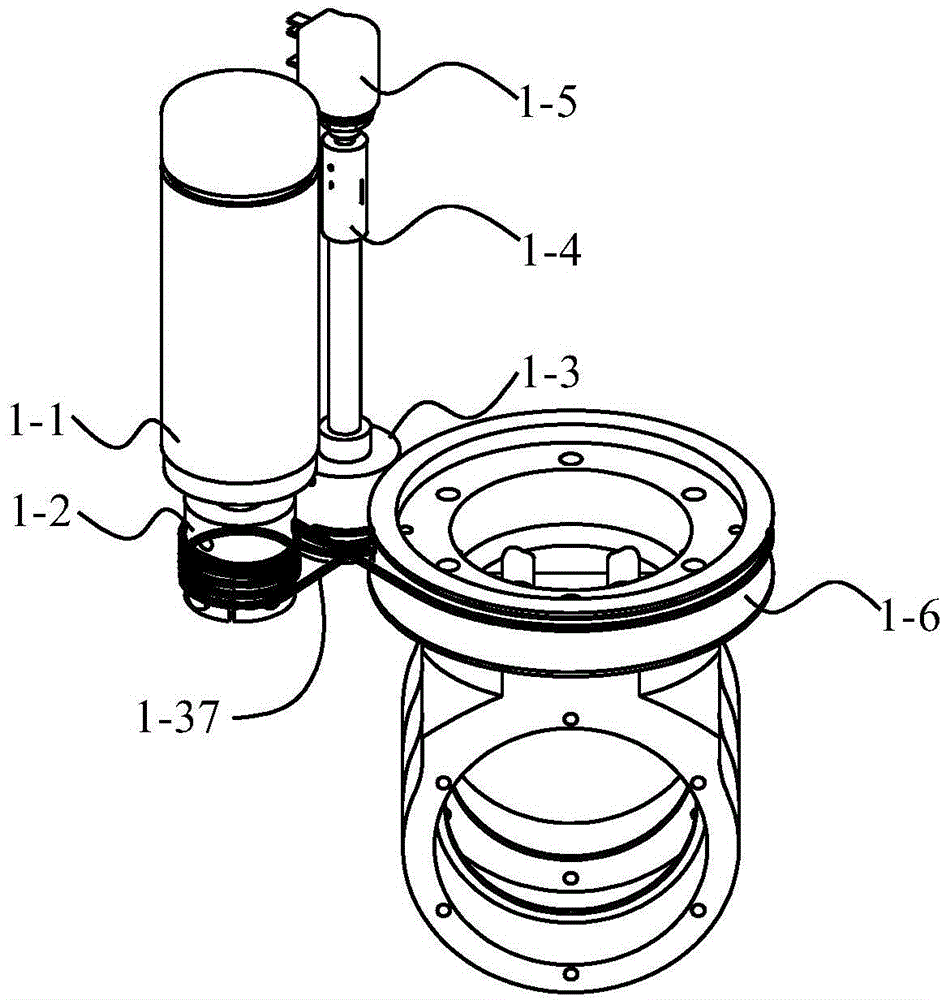
[0028] The first joint transmission mechanism includes a spinning wheel 1-6, a first joint drive motor 1-1 and a first rotating shaft 1-4 installed on the base, and the first joint drive motor The motor shaft of 1-1 is fixed with a first wire fixing wheel 1-2, and one end of the first rotating shaft is fixedly connected with a first wire wheel 1-3 and the other end is connected with a first potentiometer 1-5. The autorotation body B is fixed on the bottom of the autorotation silk wheel 1-6, the central axis o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More