

A kind of flexible robot hand and its control method
A control method and technology of robotic arms, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of limited operability and adaptability of robotic arms, limited movement ability, and not very suitable for a wide range of tasks and environments.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
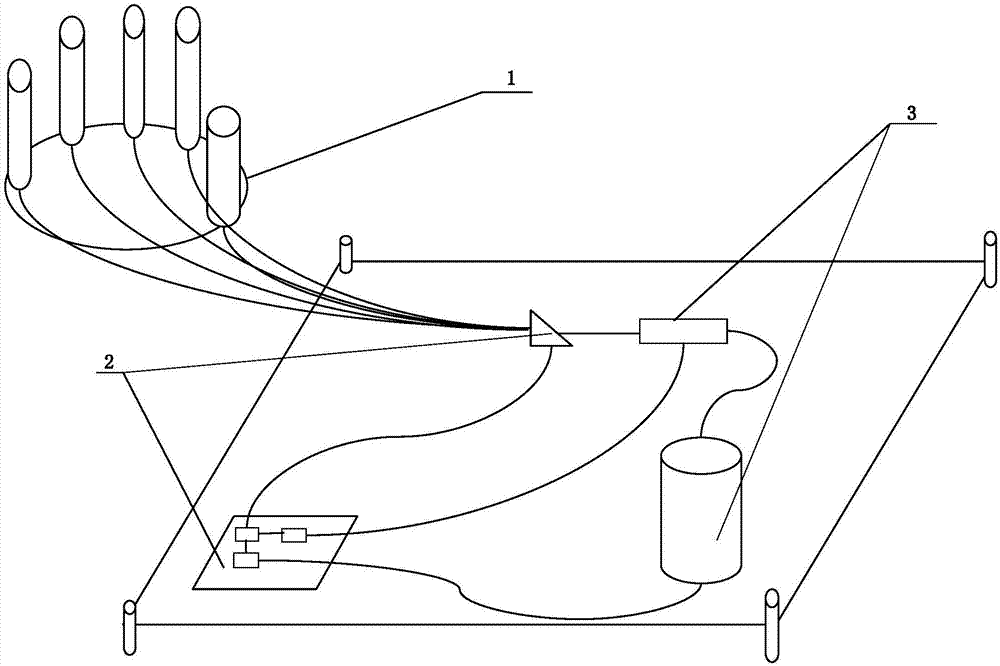
[0031] see figure 1 As shown, a flexible robotic hand of the present invention includes: a hand-shaped body, a drive assembly 3, and a control assembly 2. The fingers of the hand-shaped body include several execution bodies 1, and the execution bodies 1 include elastic cavities. , the elastic cavity is provided with a first fixing member that restricts the radial expansion of the elastic cavity and a second fixing member that restricts the axial expansion of one side of the elastic cavity, and the drive assembly 3 is connected with the elastic cavity and controlled The pressure in the elastic cavity, the control assembly 2 includes a controller for controlling the drive assembly 3, a bending sensor arranged axially along the elastic cavity, an inertial sensor arranged at intervals along the axial direction of the elastic cavity, and one end is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More