

Abdominal cavity minimally invasive surgery system and needling time determination method
A technology of minimally invasive surgery, middle and lower needles, applied in surgical navigation systems, surgery, trocars, etc., can solve the problems of insufficient precision, operation fatigue, large incision, etc., to ensure safety and effectiveness, and reduce difficulty. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
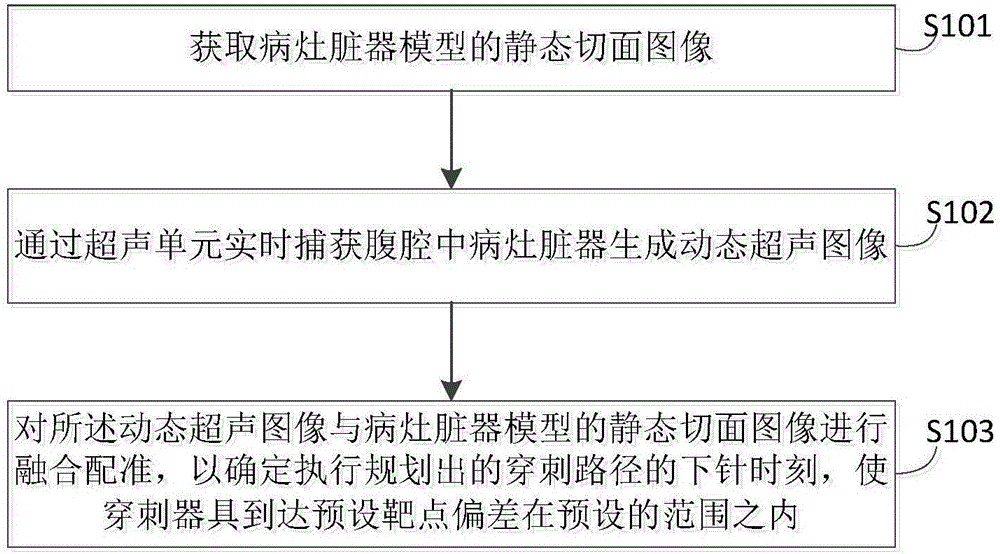
[0027] figure 1 It is a schematic flow chart of the method for determining the timing of needle insertion in the embodiment of the present invention-abdominal minimally invasive surgery; figure 1 shown, which includes:
[0028] S101. Obtain a static section image of the lesion organ model;
[0029] In this embodiment, in step S101 , three-dimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More