

Small lobedfruit schizocapsa rhizome harvesting robot
A technology for picking robots and paddy fields, applied in excavators, harvesters, excavators and other directions, can solve the problems of reduced work efficiency, time-consuming and laborious, and elevated alanine aminotransferase.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
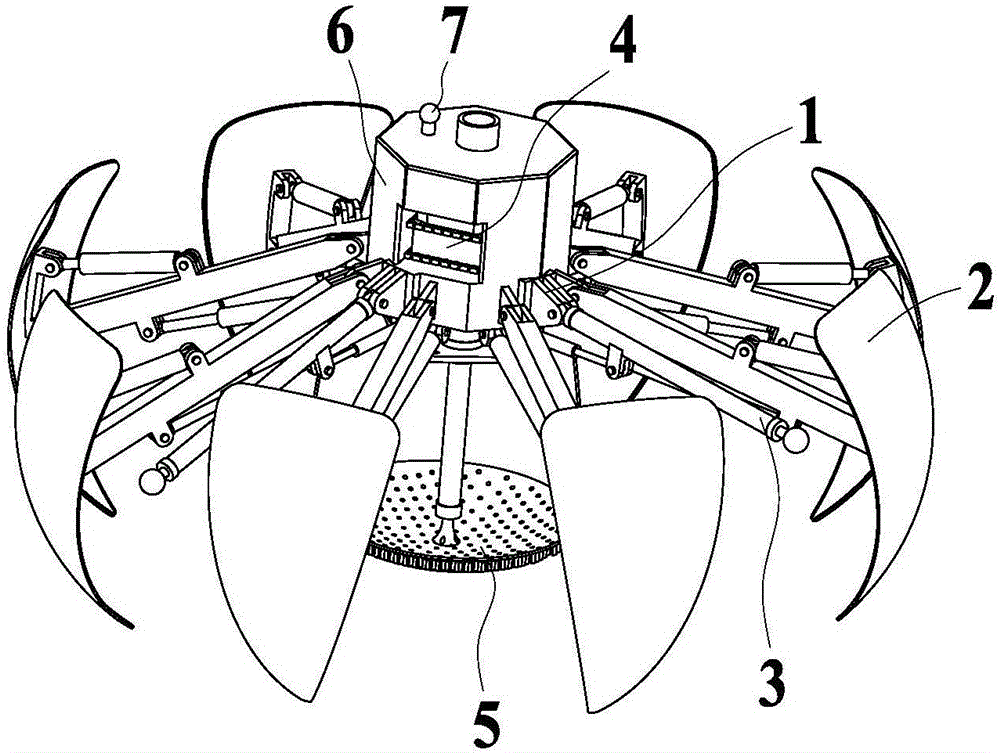
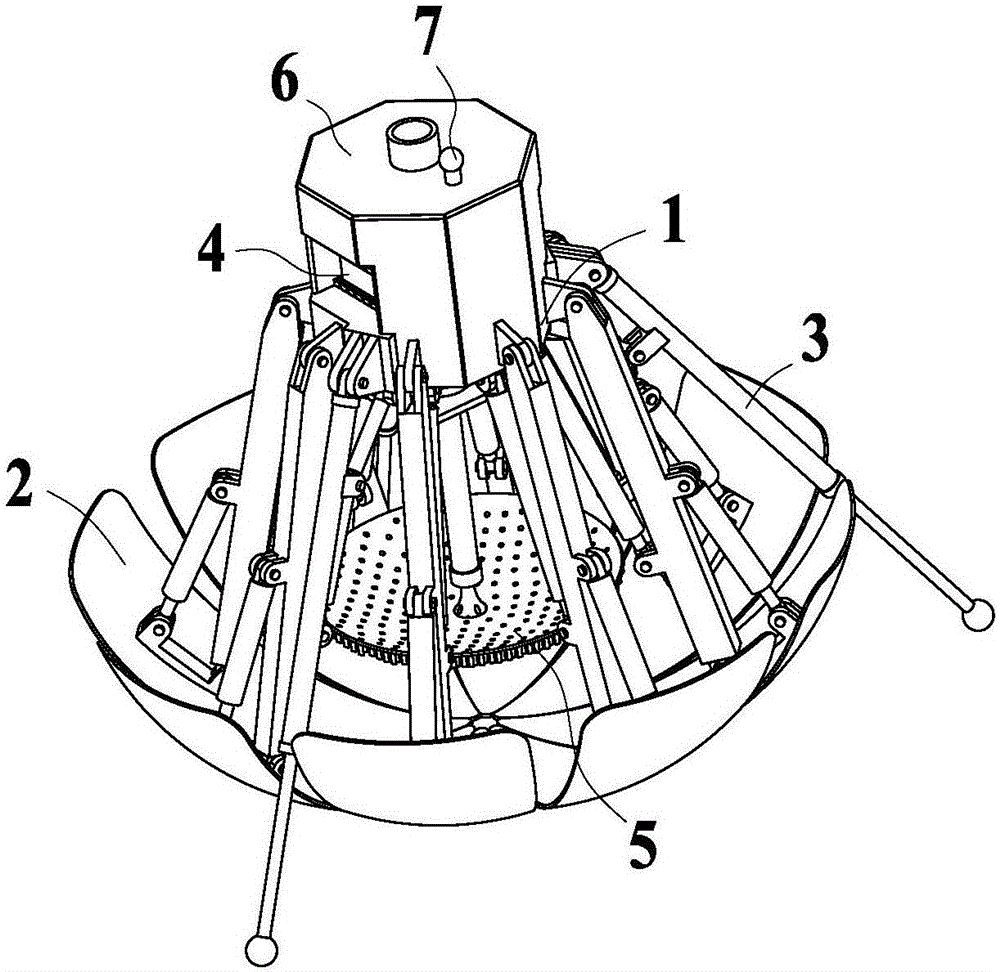
[0027] Such as figure 1 , figure 2 and Figure 7 As shown, a kind of small-sized paddy field seven picking robot of the present invention comprises main frame 1, walking device 2, support device 3, controller 4, soil removal device 5, cleaning device 6, balance sensor 7 and pressure sensor 8; The walking device 2 is located at the lower part of the main frame 1, the support device 3 is installed on the periphery of the main frame 1, the controller 4 is located at the upper part of the main frame 1, and the soil removing device 5 is located at the lower part of the main frame 1, The cleaning device 6 runs through the main frame 1 , the balance sensor 7 is located at the upper part of the cleaning device 6 , and the pressure sensor 8 is located...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More