

A mobile control system for a multi-layer configurable legged climbing robot
A control system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of high control coupling, low reusability, single function, etc., and achieve concise maintenance process, shortened development time, and business logic. clear effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
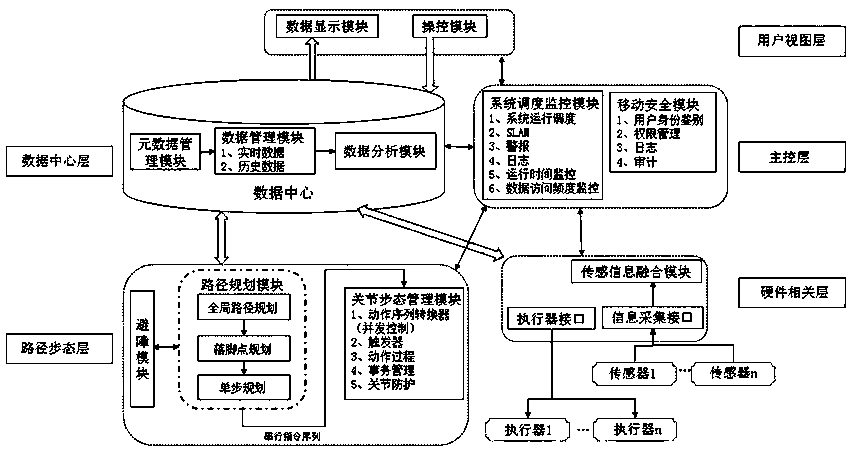
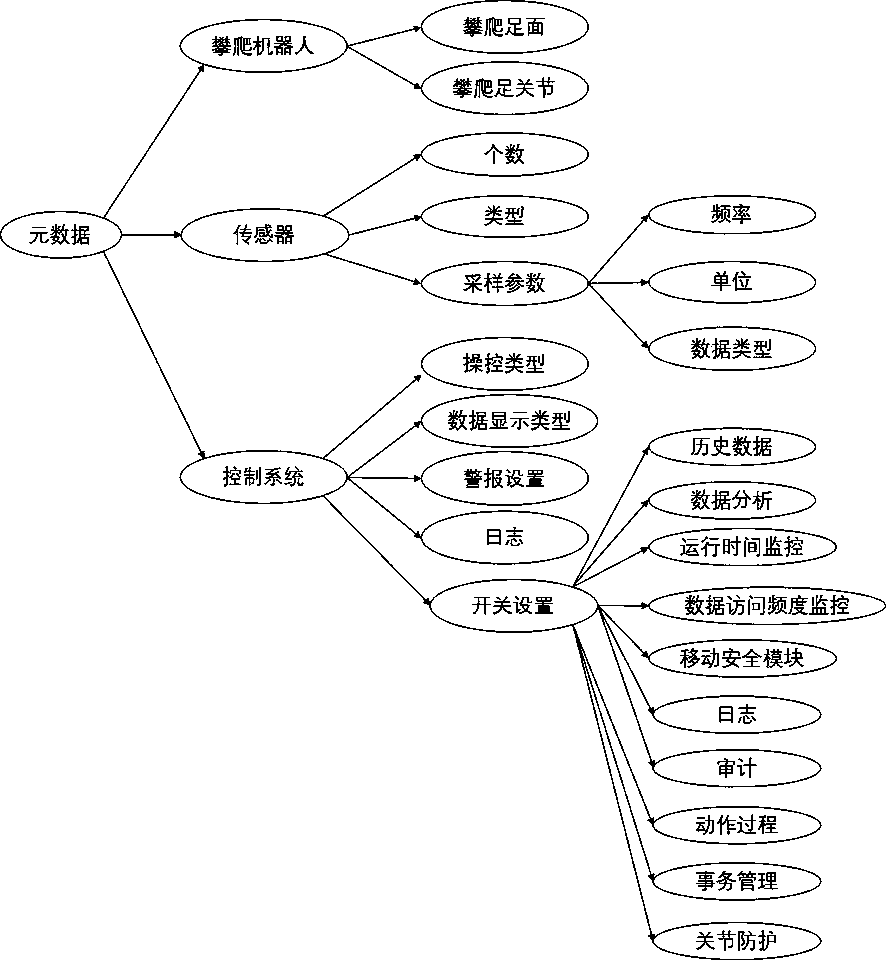
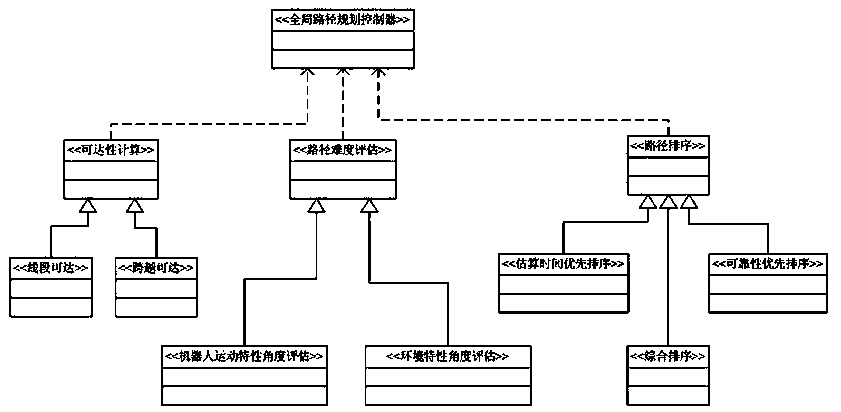
[0039] The mobile control system of the legged climbing robot needs to complete the robot's perception, positioning, path planning, gait planning, obstacle avoidance, control, etc., involving sensor information data, map data, path and gait data, control data, etc., with a large amount of data , The data flow is fast, usually measured in milliseconds; a variety of data needs to be fused, transmitted, and calculated, and the data processing frequency is high, and the data coupling degree is high; the data complexity is high, and the control coupling degree is high. The control systems of climbing robots are all centered on data, which need to collect and organize a large amount of sensory information data, path gait data and control data, and calculate and make decisions based on these data; however, with hardware, planning methods, control strategies The content and format of the data are often adjusted slightly. This adjustment usually requires modification of all places where...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More