

Multi-lane-line detection method
A technology for lane line and line detection, applied in instrument, calculation, character and pattern recognition, etc., can solve the problems of inability to make full use of lane line-like features, inability to obtain results, inability to robust multi-lane line detection, etc., to achieve high practical Application value, good effect, time-saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024]The present invention will be described in more detail below in conjunction with specific implementations. The following specific implementations will help developers understand the present invention, but will not limit the present invention in any form. It should be noted that, for those skilled in the art, several modifications and improvements can be made without departing from the concept of the present invention, and these are within the protection scope of the present invention.
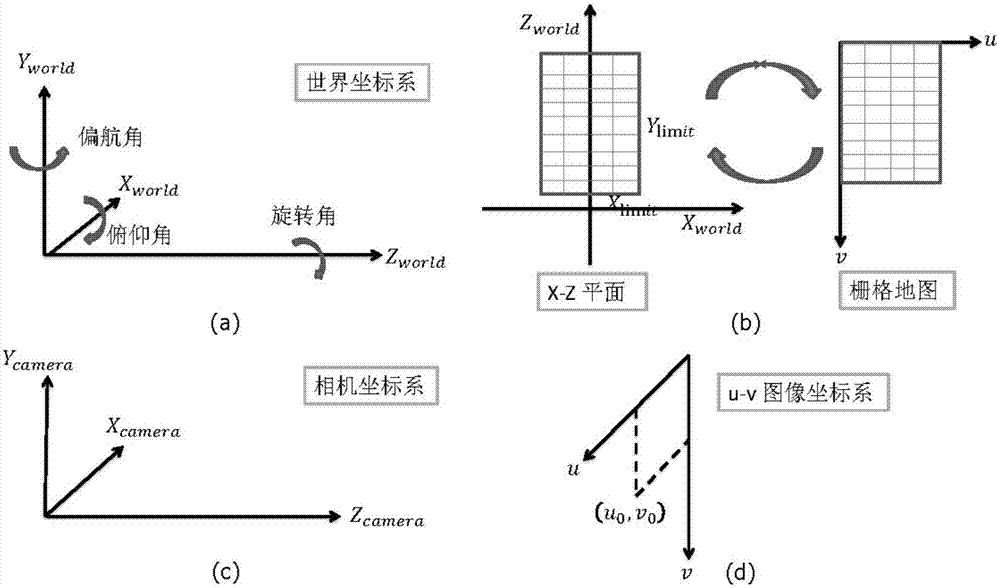
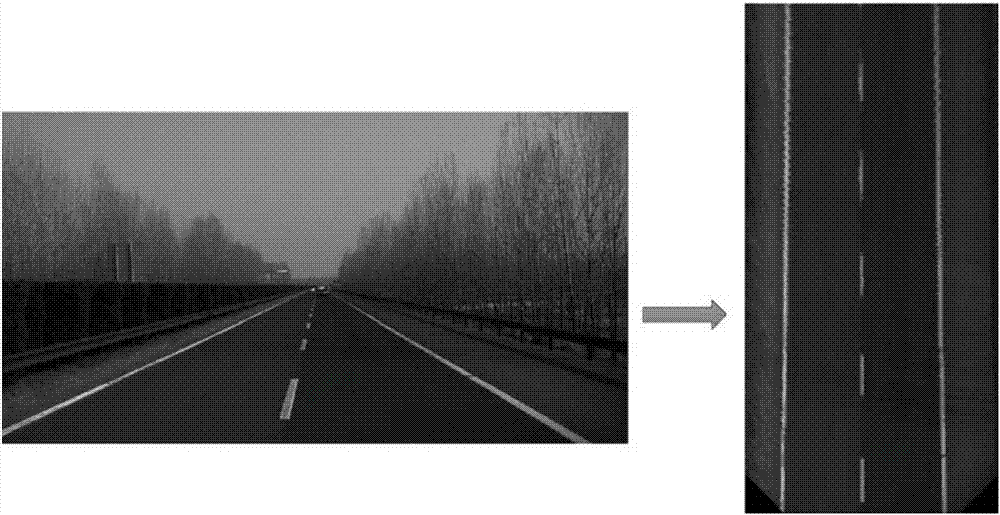
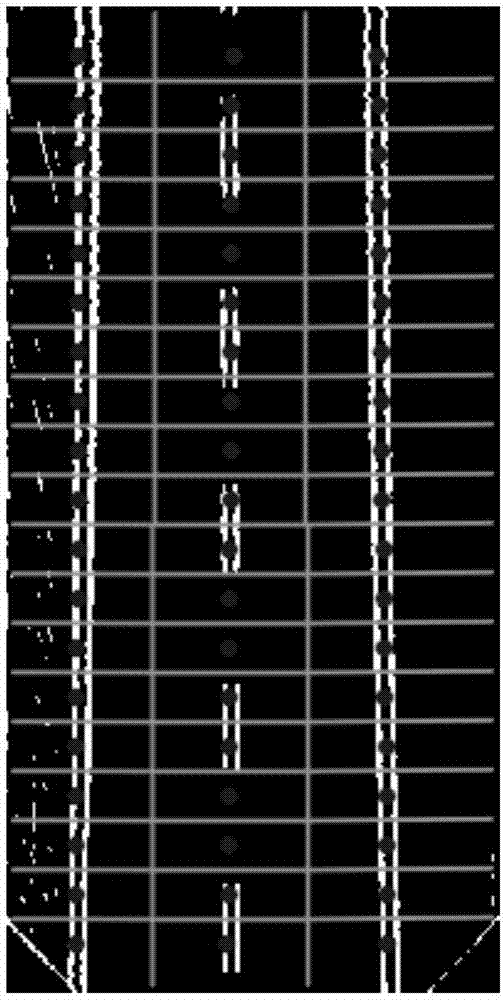
[0025] This implementation example provides a multi-lane detection method. First, this paper separates the red channel of the color image collected by the camera as the grayscale image to be processed. Then, according to the installation position of the camera on the autonomous vehicle, the internal parameters of the camera, and the setting The size of the grid map is determined, and the original image is subjected to inverse perspective transformation to obtain the grid map. Secondly, ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More