

Flexible multi-joint surgical instrument for robot assisted minimally invasive surgery
A robot-assisted, minimally invasive surgery technology, used in surgical manipulators, surgical robots, computer-aided surgery, etc., can solve the problems of surgical instruments cannot be positioned, moved, work range and flexibility restrictions, etc., to enhance the ability to adjust the terminal posture , the effect of good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
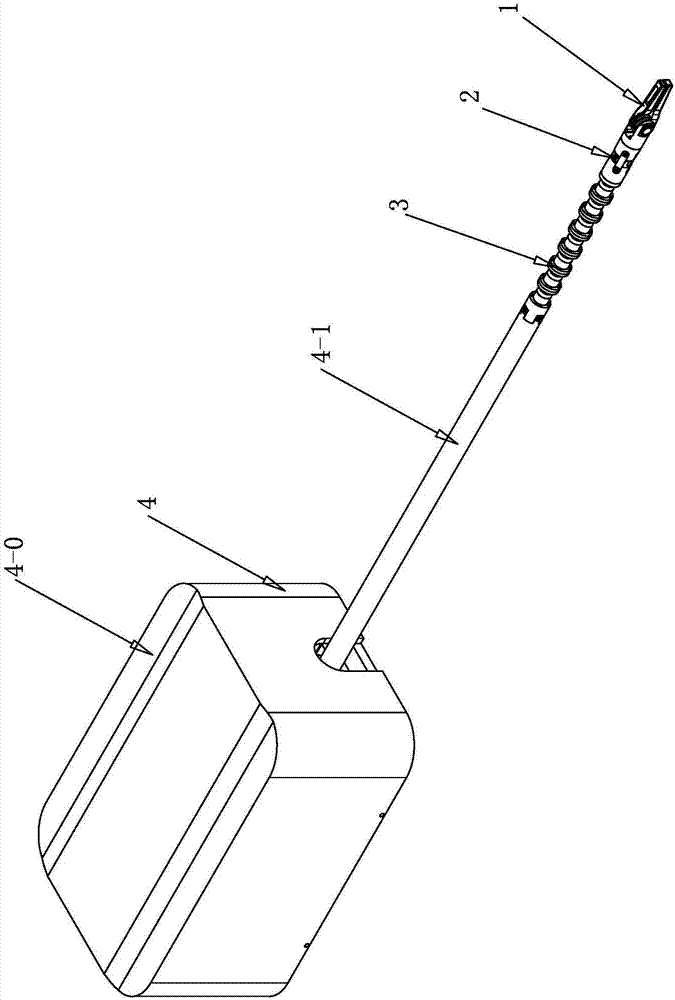
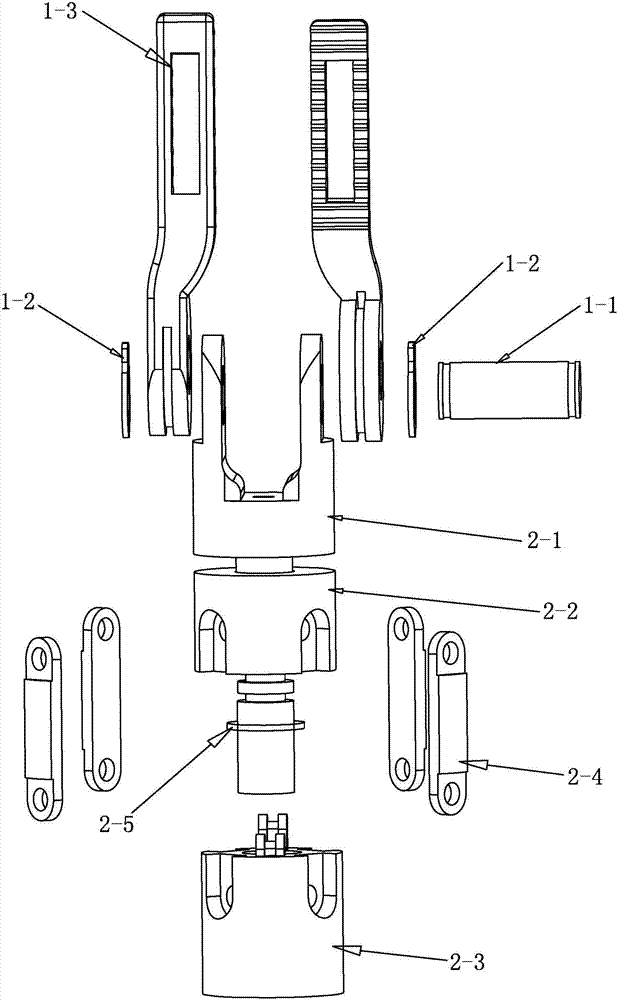
[0061] Such as Figure 1-16 As shown, a flexible multi-joint surgical instrument for robot-assisted minimally invasive surgery includes a terminal surgical forceps mechanism 1, an autorotation joint 2, a wrist flexible joint 3 and a power drive box 4;
[0062] The rotation joint 2 is fixedly installed on the end surgical forceps mechanism 1;
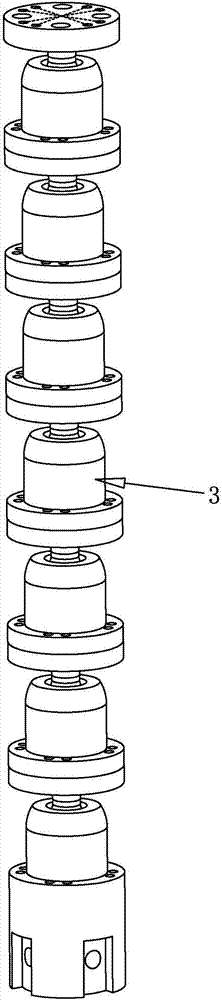
[0063] The wrist flexible joint 3 includes several spherical joint structures connected sequentially at the end with the same structure, and the head-end spherical joint structure of the wrist flexible joint 3 is connected with the rotation joint 2;
[0064] The power drive box 4 includes a cable routing pipe 4-1, a housing 4-0, an upper base plate 4-5, a lower base plate 4-6, five sets of motor rope pulley devices 4-3, a rope guide wheel set and a rope guide column set; The up...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More