

Route planning method and device for unmanned aerial vehicle, and electronic equipment
A technology for drones and routes, applied in the field of drones, can solve the problems of drones flying off preset routes, collision risks, and unknown route flight environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Hereinafter, the present application will be described in detail with reference to the drawings and embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
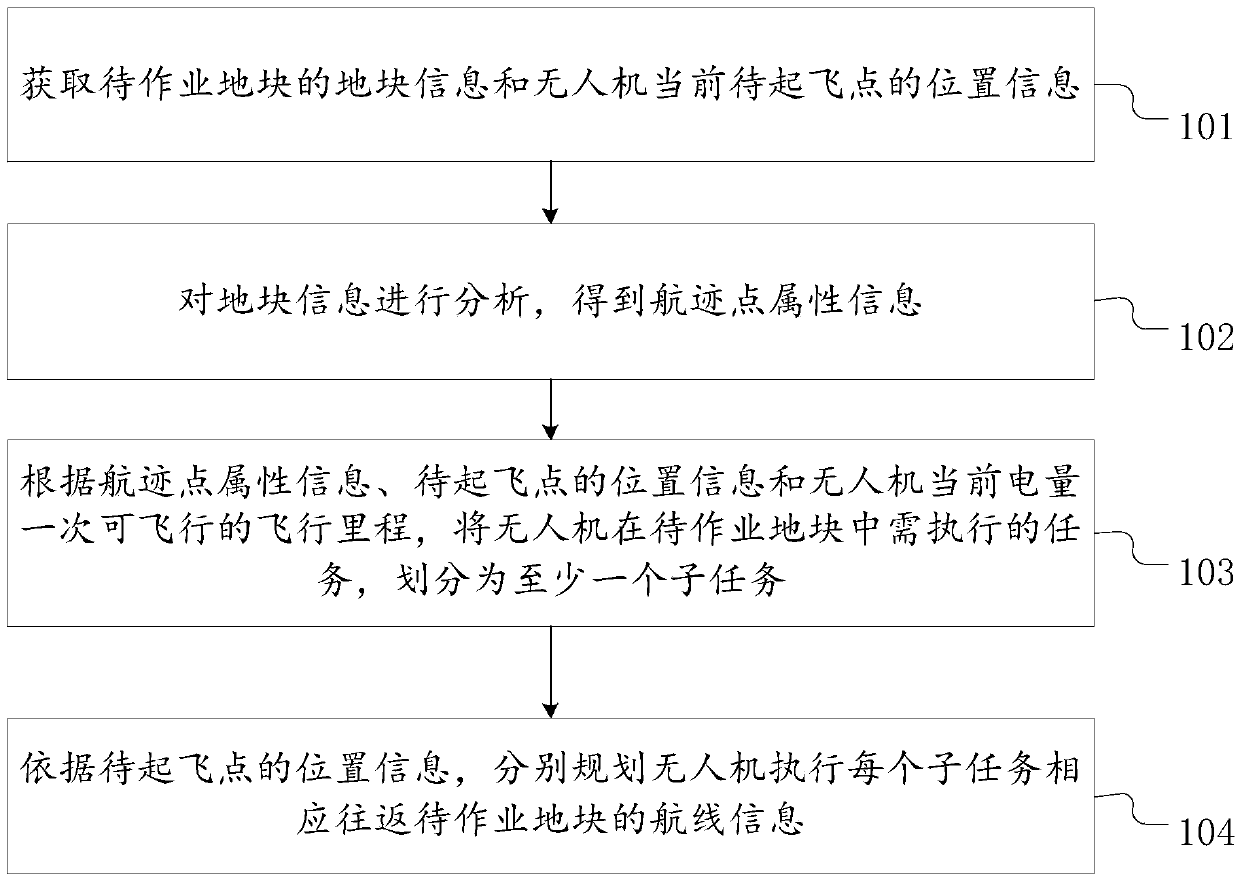
[0070] Aiming at the problem in the prior art that the route information obtained according to the pre-set take-off position planning, instructing the UAV to perform tasks, there will be a risk of collision, this embodiment provides a UAV route planning method, which can reduce unnecessary Human-machine collision risk, such as figure 1 As shown, the method includes:
[0071] 101. Obtain the land parcel information of the land to be operated and the position information of the current take-off point of the UAV.
[0072] Among them, the plot information may include the shape, characteristics, and specific coordinates of the location of the plot to be operated, as well as information such as obst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More