

A robot path planning method based on spider colony algorithm
A path planning and robotics technology, applied in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc., it can solve the problems of poor convergence speed and poor search ability of SSO algorithm, so as to improve the convergence speed and The effect of search accuracy, strong execution, and excellent convergence accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
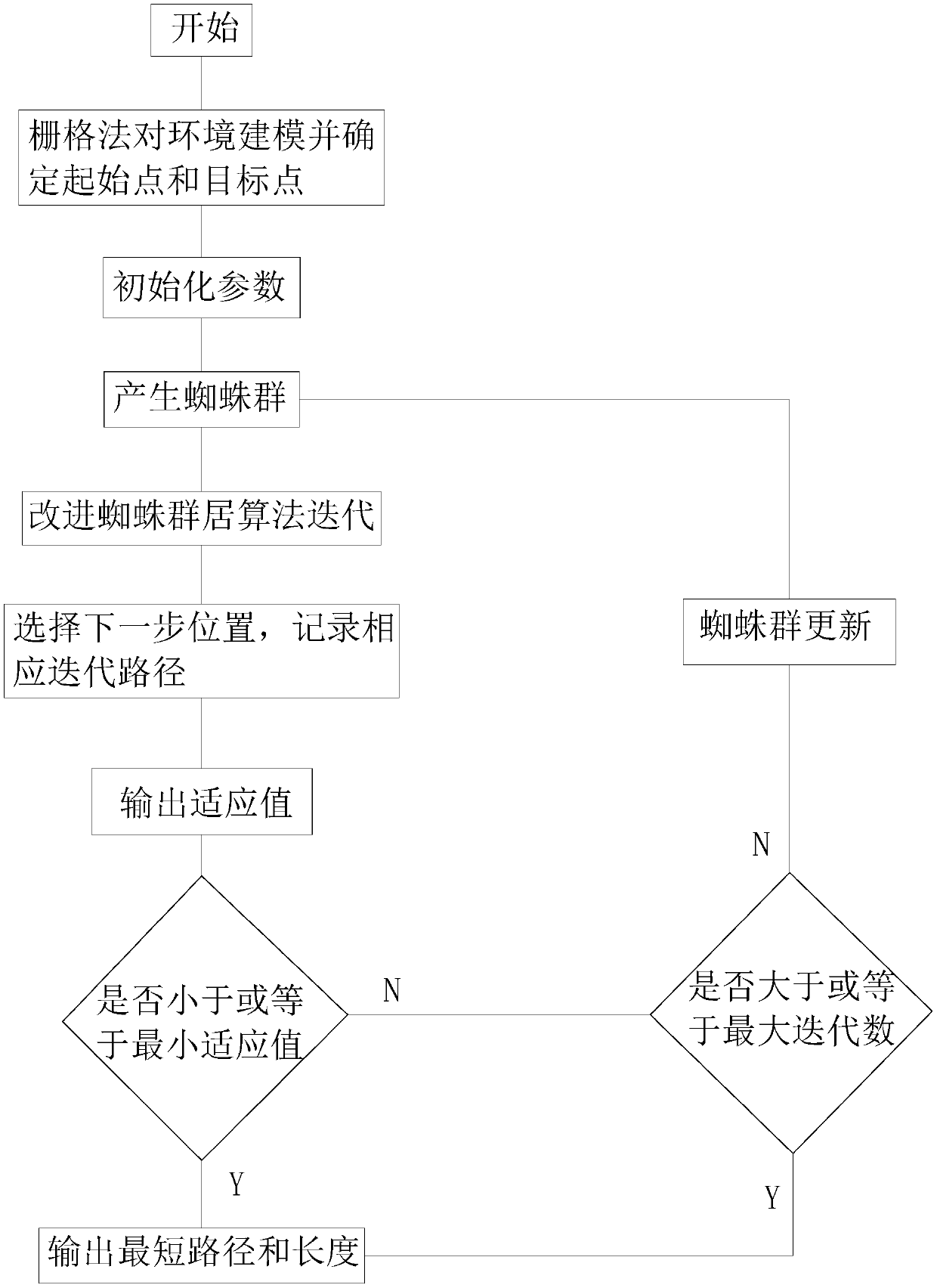
[0047] like figure 1Shown, the robot path planning method of a kind of spider colony algorithm of the present invention comprises the following steps:
[0048] Step 1: Use the grid method to model the map environment, and set the starting node, target node, and obstacles;
[0049] Step 2: Initialize the basic parameters of the spider colony algorithm, including the population number N, the mating radius r, the maximum number of iterations T, and the minimum fitness value;
[0050] Step 3: randomly assign the initial spider population, and determine the current fitness value of each spider according to the fitness function;
[0051] Step 4: The spider population completes the cooperation process according to the learning strategy of the spider colony algorithm, generates new spider individuals, selects the better individuals in the new and old spider p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More