

Modular tactile perception control device and method
A technology of tactile perception and control devices, which is applied in the field of perception and control, can solve the problems of limited range and ability of perception, poor scalability of the control system, limited amount of tactile information, etc., to achieve shortened development cycle, strong superiority and The effect of practicality and convenient function development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the present invention will be described in detail below with reference to the drawings and embodiments. It should be understood that the examples are only used to explain the present invention, not to limit the present invention.
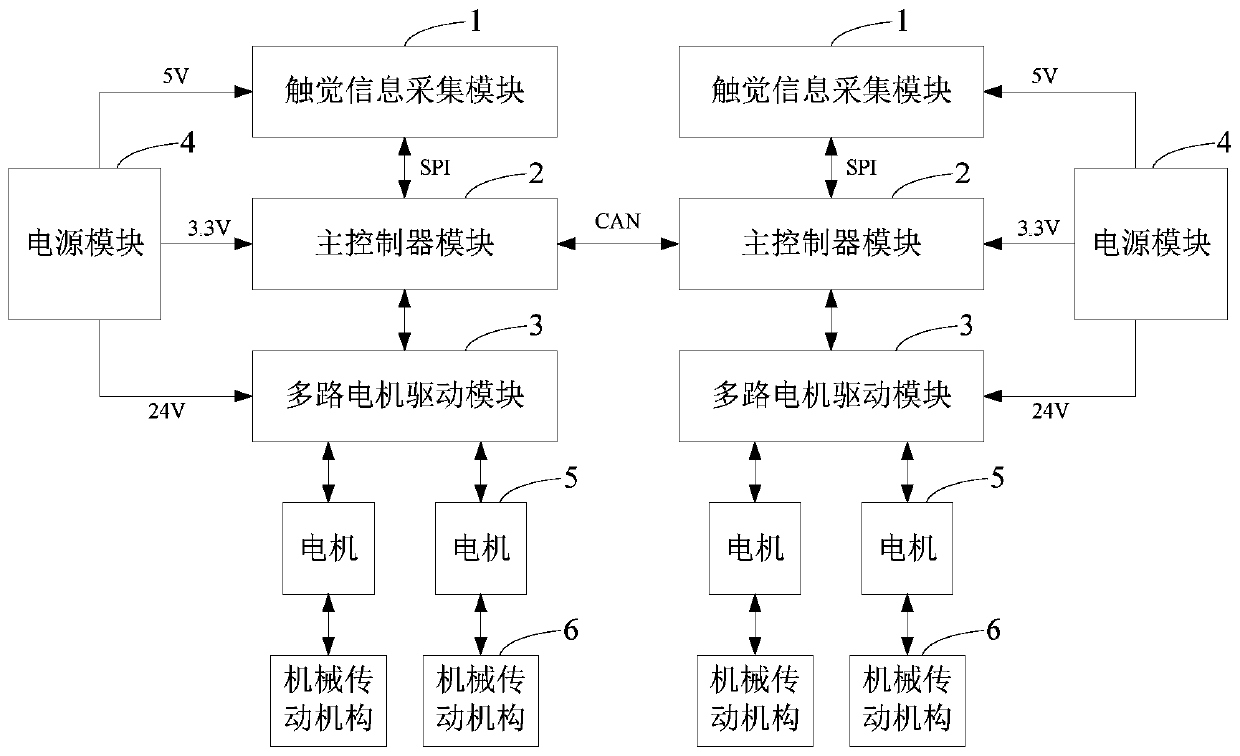
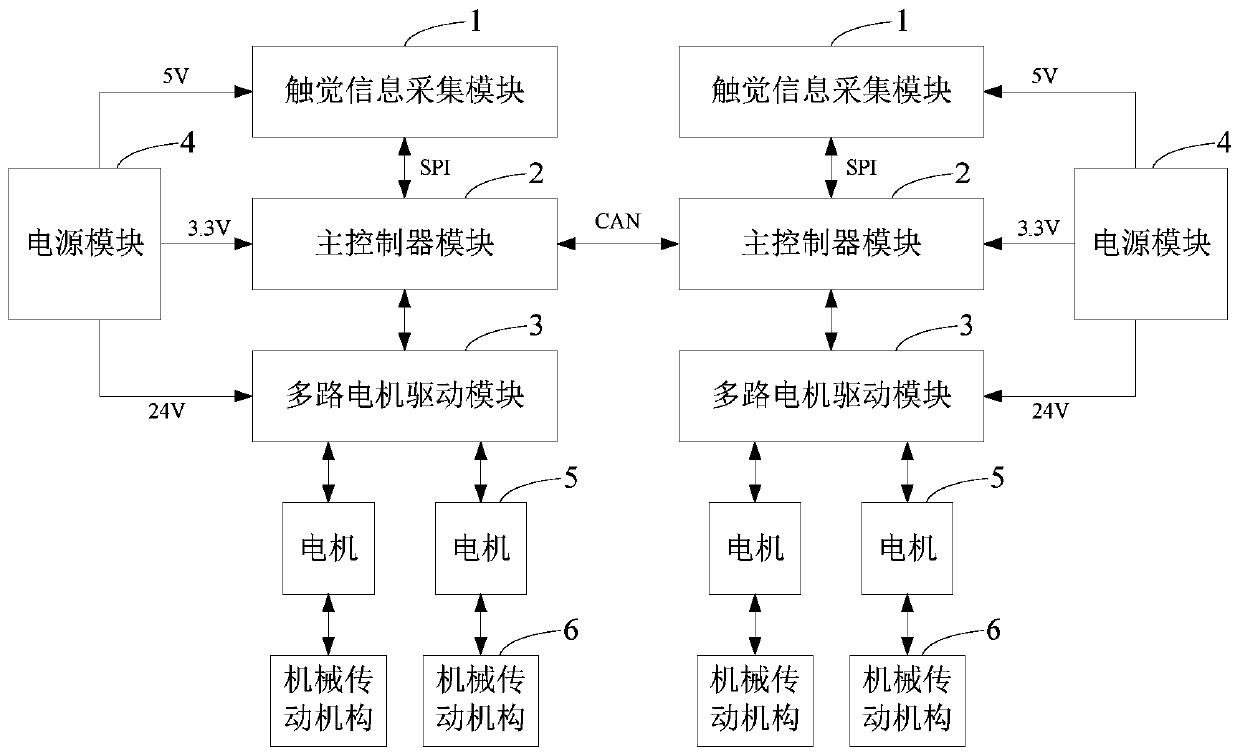
[0037] Such as figure 1 As shown, a modular tactile perception control device of the present invention includes: a tactile information collection module 1 , a main controller module 2 , a multi-channel motor drive module 3 , multiple motors 5 and multiple mechanical transmission mechanisms 6 .
[0038] The tactile information collection module 1 includes a plurality of tactile sensors, and each tactile sensor is used to collect a real-time contact force signal output by the corresponding mechanical transmission mechanism 6 . Realize the real-time detection and identification function of contact force. When a tactile sensor cannot meet actual needs, multi-channel expansion can be performed, and the collected informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More